environment have been implemented.
1. The robotic arm is fixed on the plane; protective measures are in
place within the range of motion.
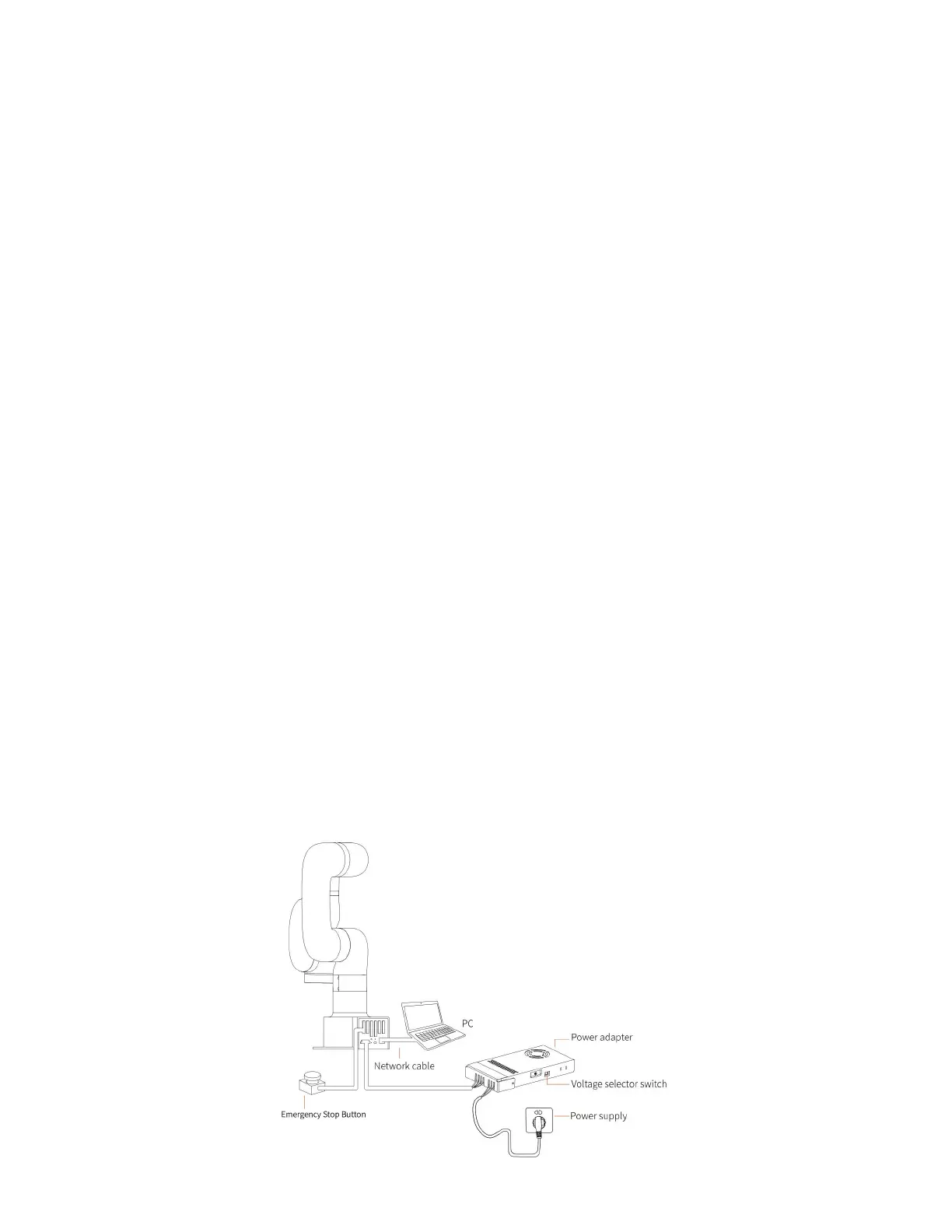
2. Check if the connection between the adapter and the robotic arm, power
supply, and network cable is stable.
5. Check if the network is connected. If the network indicator flashes
frequently, it means the network communication is normal.
6. Check if the robotic arm is powered and the emergency stop button is
disabled. If the power indicator of the robotic arm lights up, it means
the power is on.
1.2 Connect to the Robotic Arm
1.2.1 The Robotic Arm Network Settings
There are four ways of network settings for the robotic arm. You can
choose the appropriate network setting method according to your scenario:
(1) The robot is directly connected to the PC.
Note: Recommended connection method.
(2) The robot, PC and router are connected by Ethernet cable.
 Loading...
Loading...




