2. Dual Robot Calibration
2.8 Measuring Positions and Calibration Statistics
After step no.: 16, the robot will begin measure and identify the calibration. First a number of initial measure-
ments are collected. A preliminary calibration is calculated from those. Second, the final set of measurements
will be done and the final calibration will be calculated, see Figure 2.23 and 2.24.
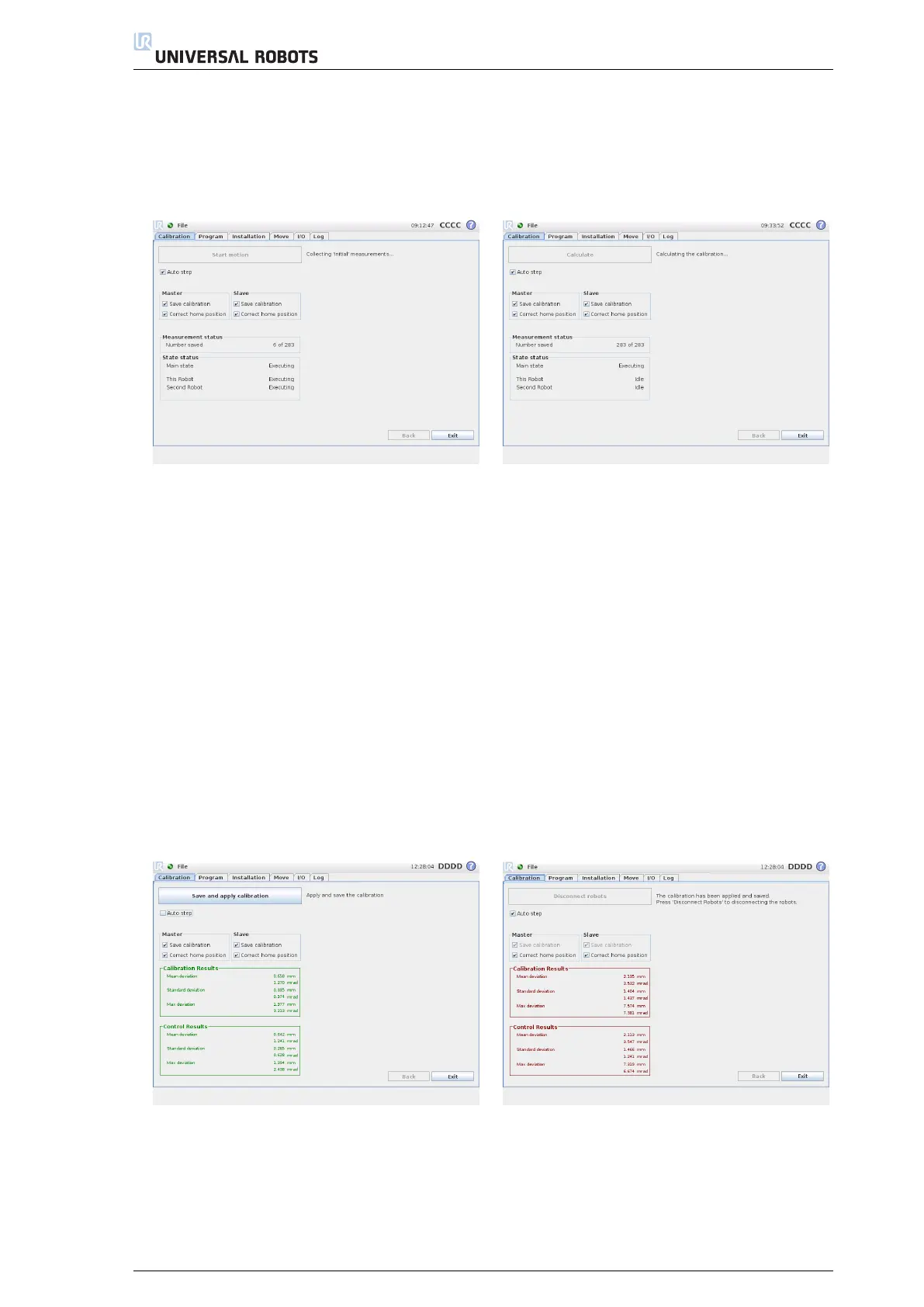
Figure 2.23: Collecting measurements Figure 2.24: Calculating the calibration
Afterwards, a statistic is given that describes whether the found calibration is usable (shown in green, see
Figure 2.25) or problematic (shown with red, see Figure 2.26).
If the result was successful as expected and the Auto step box is checked, it will automatically continue to
step no: 17.
If the result was unsuccessful, the calibration procedure will not be able to continue. Calibration may fail
for various different reasons. Please use one or more of the troubleshooting hints listed below and start a new
calibration by going back to step 1:
• Check that security settings are set to least restricted (see step 5).
•
Remote the tool connector and unmount the robots from the calibration horse. Clean all surfaces on
the robots, the calibration horse and the tool connector. Remount the robots while making sure that
nothing is stuck between the parts.
•
If one or more joints have been replaced, then check that they are mounted correctly. For example,
check that the screw washers are on the correct side of the output flange.
• If one or more joints have been replaced, then adjust the joint’s zero position (see Service Manual).
Figure 2.25: Successful calibration Figure 2.26: Problematic calibration
The section Calibration Results contains the statistics for the accuracy of the found calibration. The
Control Results are statistics for a number of control measurements done throughout the calibration process
which only are used to validate the calibration.
The statistics are given in two units: millimeters (mm) and milliradians (mrad) which refers to the RMS
deviation in Cartesian space. The statistics contains the fields:
11