2. Dual Robot Calibration
(7)
Use either the master/slave or manual connection method to establishment network connection
between the two robots controllers.
Note: Robot 1 is the master robot and Robot 2 is the slave.
2.5.1 Master/Slave Connection
A Master/Slave connection works by connecting two robots via a network cable or over a network switch. One
robot must be selected as master and the other as slave. Selecting one of these cases sets up the IP address
automatically.
CAUTION:
Notice that the IP-addresses
10.17.17.18
and
10.17.17.19
will be used for master/slave
connections. Connecting the robots to a local area network may interfere with other devices
having the same IP.
(8)
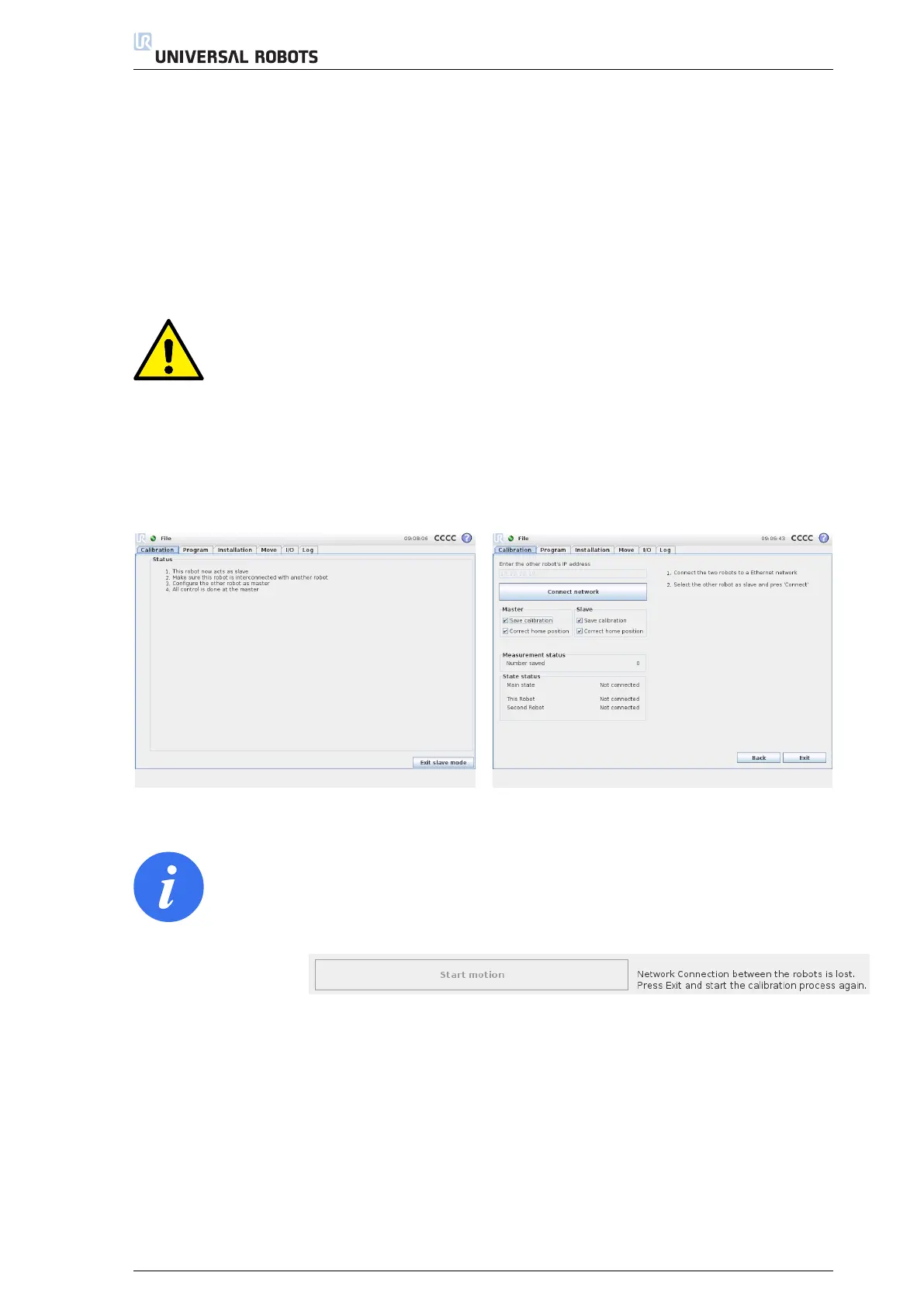
When the slave (Robot 2) is ready and has entered the screen in Figure 2.10, press Connect network on
the master to establish the network connection, see Figure 2.11. The screens that follow are described
in Section 2.7.
Figure 2.10: Slave mode Figure 2.11: Master mode
NOTE:
Network communication between the Master robot and the Slave robot can break down,
causing the calibration screen to change as displayed in Figure 2.12.
Figure 2.12: Network Communication break during calibration
2.5.2 Manual mode
Selecting Manual leads to the screen in Figure 2.13.
(9)
In Figure 2.13, Enter the IP number or host name of the Slave by clicking the text field with the text "IP
address or host name".
(10) Connect by press Connect network, see Figure 2.13.
7

 Loading...
Loading...







