2. Dual Robot Calibration
2 Dual Robot Calibration
This manual is a step-by-step tutorial for integrators that describes how to perform Dual Robot Calibration of
the kinematics. The method can be used on Universal Robots—with Software version 3.0.16000 up to version
3.3 and later.
The method is patented pending under the patentCalibration and Programming of Robots, Søe-Knudsen,
Rune (inventor); Petersen, Henrik Gordon (inventor); Østergård, Esben Hallundbæk (inventor), IPC: B25J9/16,
Patent number: EP2012/068337, September 18, 2012. International Publication number WO 2013/045314 A1.
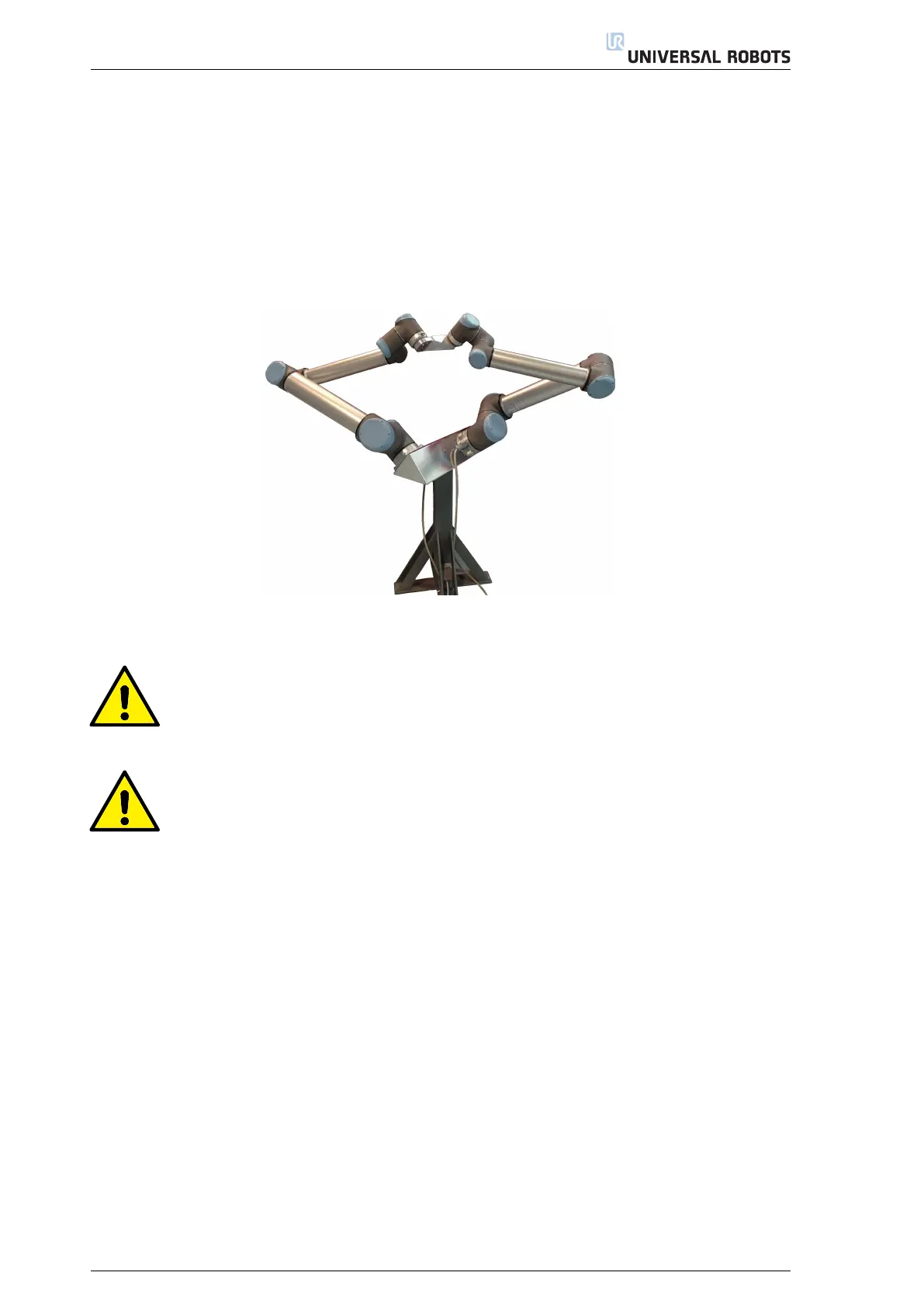
Figure 2.1: The Dual Robot Calibration method.
CAUTION:
Stay clear of the robot when using Dual Robot Calibration.
CAUTION:
Not all calibrations are good calibrations. Please pay attention to the generated statistics
before saving the result of the calibration. If a calibration is not performed with care, the
robot may become inaccurate.
The method requires a Dual Robot Calibration kit from Universal Robots (purchase number: 185500) and
one pair of UR3, UR5 or UR10 robots, respectively, with a CB3 control box. The robot bases are connected
with the Calibration Horse and the robot tools are connected by the Tool Connector, see Figure 2.1. This
creates a closed chain where the distance between the bases and the tools are fixed to known distances. When
the robots has been connected it can perform a number of measurements from coordinated movements to
different positions. This creates a set of data which creates a mathematical foundation for determining the
robot arm lengths and link rotations of the robots, i.e. the Denavit-Hartenberg parameters.
2

 Loading...
Loading...







