2. Dual Robot Calibration
2.2 Mounting the Robots to the Calibration Horse
(1)
Mount the Calibration Horse to a stand of a height of at least 0.5 m and mount the robots to the
Calibration Horse, as in Figure 2.3.
(2) Mount two robots of the same type and version on the Calibration Horse, see Figure 2.3.
1
2
Figure 2.3: Mount the robots on the Calibration Horse, connecting the robot bases
(3)
From the Initialization screen set the robot mounting and angle (click the "Configure Mounting" button),
see Figure 2.4:
UR3:
(a) The Tilt is approximately 52,5
◦
±5
◦
and
(b) The Rotate Robot Base Mounting is 270
◦
.
UR5 and UR10:
(a) The Tilt is approximately 52,5
◦
±5
◦
and
(b) The Rotate Robot Base Mounting is 90
◦
.
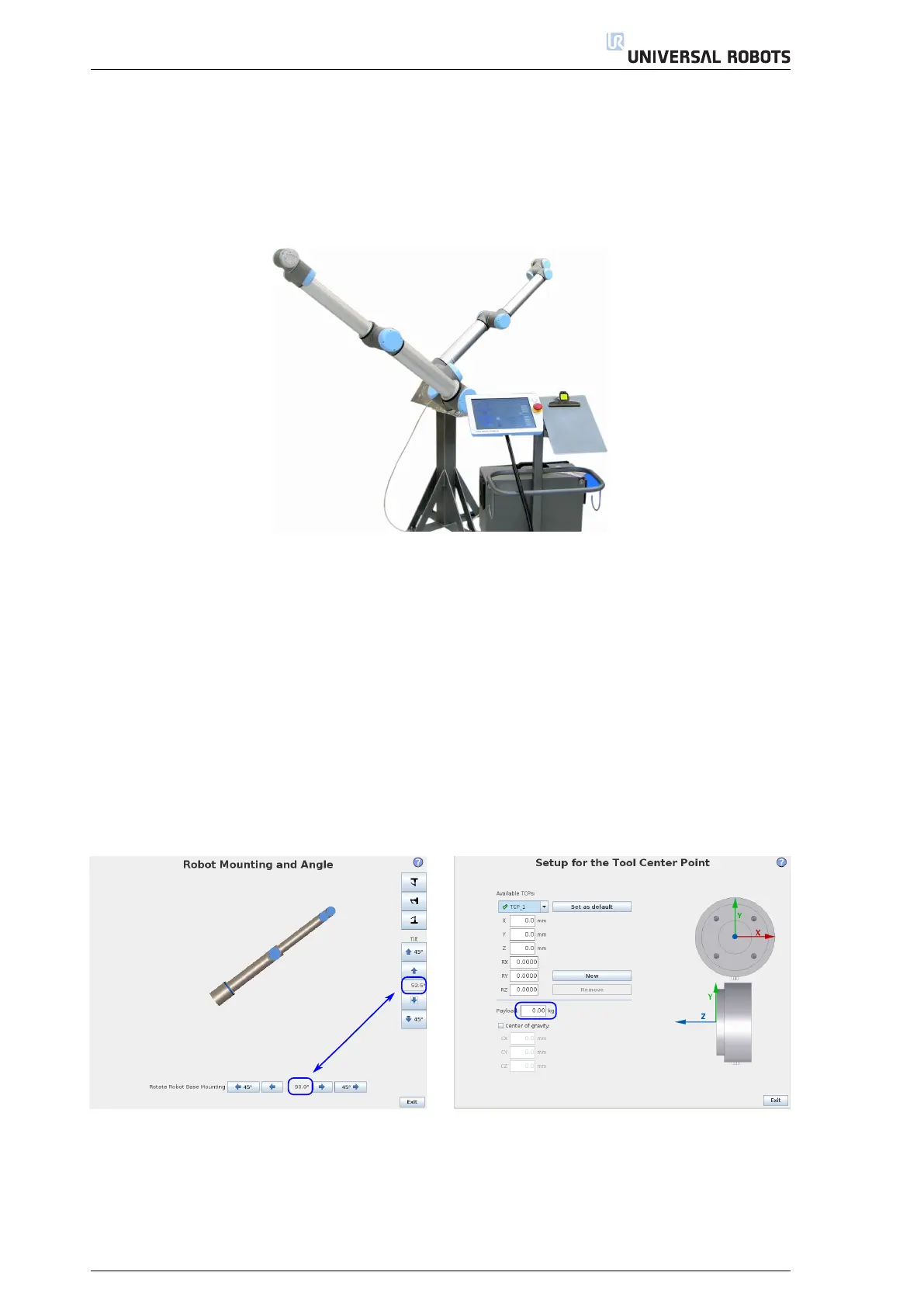
(4) From the Initialization screen set the payload to 0 kg for both robot types, see Figure 2.5.
Figure 2.4: Mounting of the robot Figure 2.5: TCP settings
2.3 Accessing the Functionality
The starting point for the method is to enable Kinematics Calibration in Expert Mode.
4

 Loading...
Loading...







