2. Dual Robot Calibration
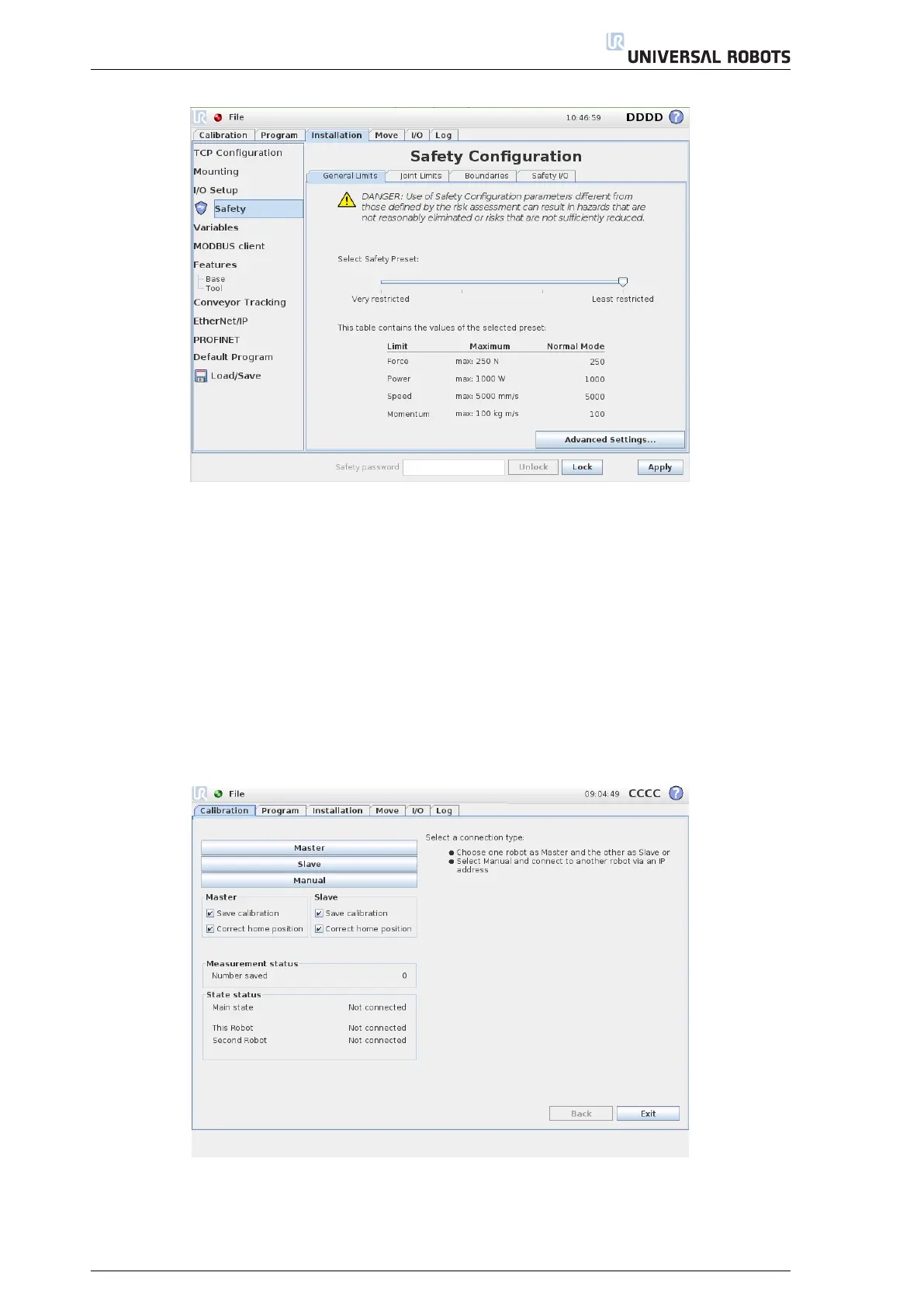
Figure 2.8: Safety settings
2.5 Network Connection Between the Robots
The Dual Robot Calibration screen appears as shown in Figure 2.9. There are a number of options to choose
from within connection types which are described below:
•
Master - the robot acts as master of the calibration process. Make sure that the other robot is selected
as Slave and that the two robots are connected with a network cable or switch.
•
Slave - the robot acts as a slave in the calibration process. Make sure that the other robot is selected as
Master and that the two robots are connected with a network cable or switch.
•
Manual - the robot acts as a master, but the slave robot is selected by an user supplied IP-address (see
description below).
Figure 2.9: Network options in Dual Robot Calibration.
The different connection types Master/Slave or Manual are described below.
(6) Connect the robot controllers with a network cable or through a network switch.
6

 Loading...
Loading...







