τ≥ 2.5μs
(τ/T) × 100 = 40%~60%
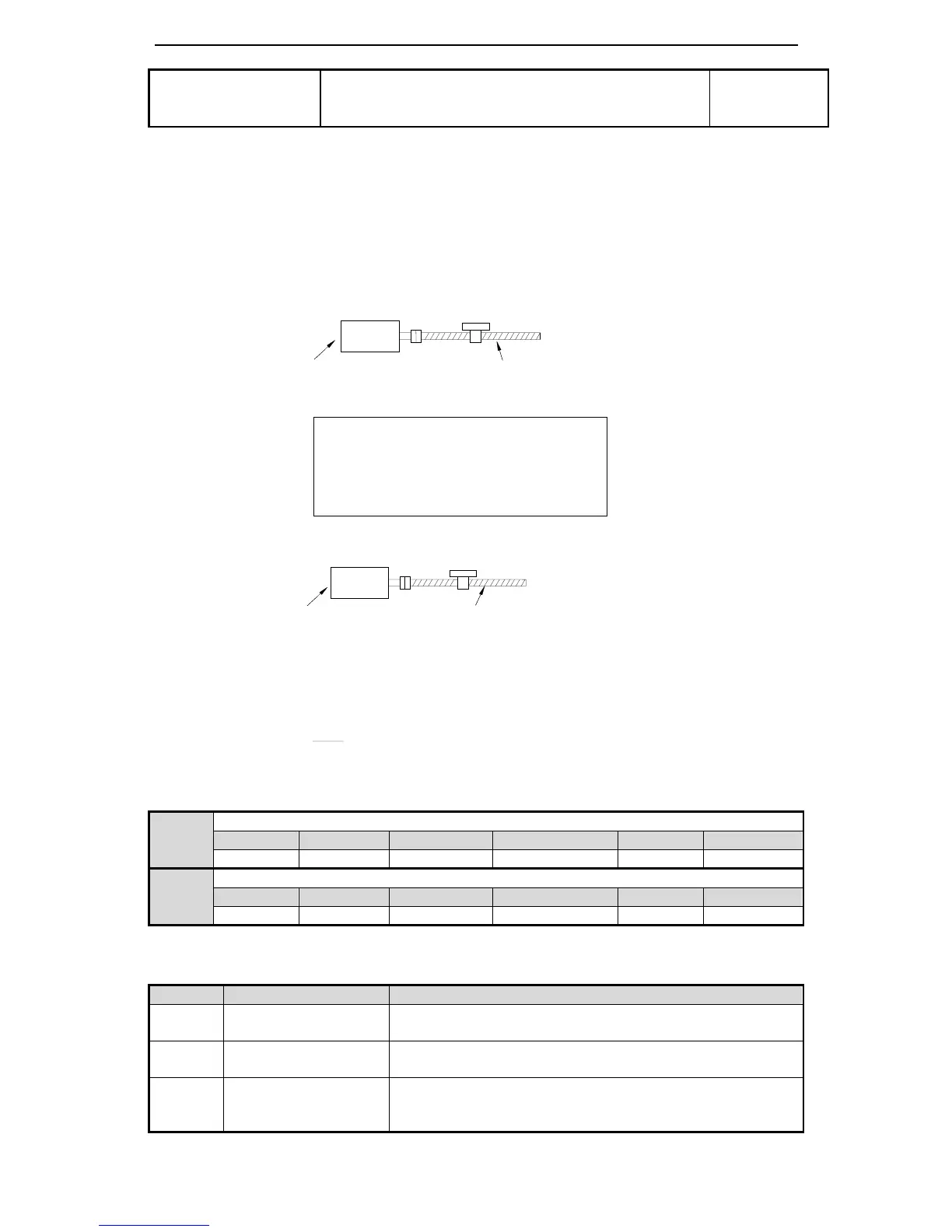
5-3-3. Electronic gear ratio
The electronic gear function is set any value for motor moving quantity corresponding to
input pulse command. The host device which sends command doesn’t need to consider the
machine deceleration ratio and encoder pulse quantity.
Not use electronic gear
Use electronic gear
Electronic gear (numerator)
Electronic gear (denominator)
1. Calculate the electronic gear ratio (B/A) using the following steps:
Confirm the machine
specification
Confirm the deceleration ratio, ball screw distance, pulley
diameter
Confirm the encoder
pulse
Confirm the servo motor encoder pulses
Set the actual distance or angle corresponding to 1 pulse of the
command controller
Define the machine condition and command unit by
electronic gear
2500×4 pulse finishes one rotation
Command input 16666 pulses
Calculate these values in the host controller
 Loading...
Loading...

