4.4.2 Replacement of wrist IRB 2400L
Location of wrist
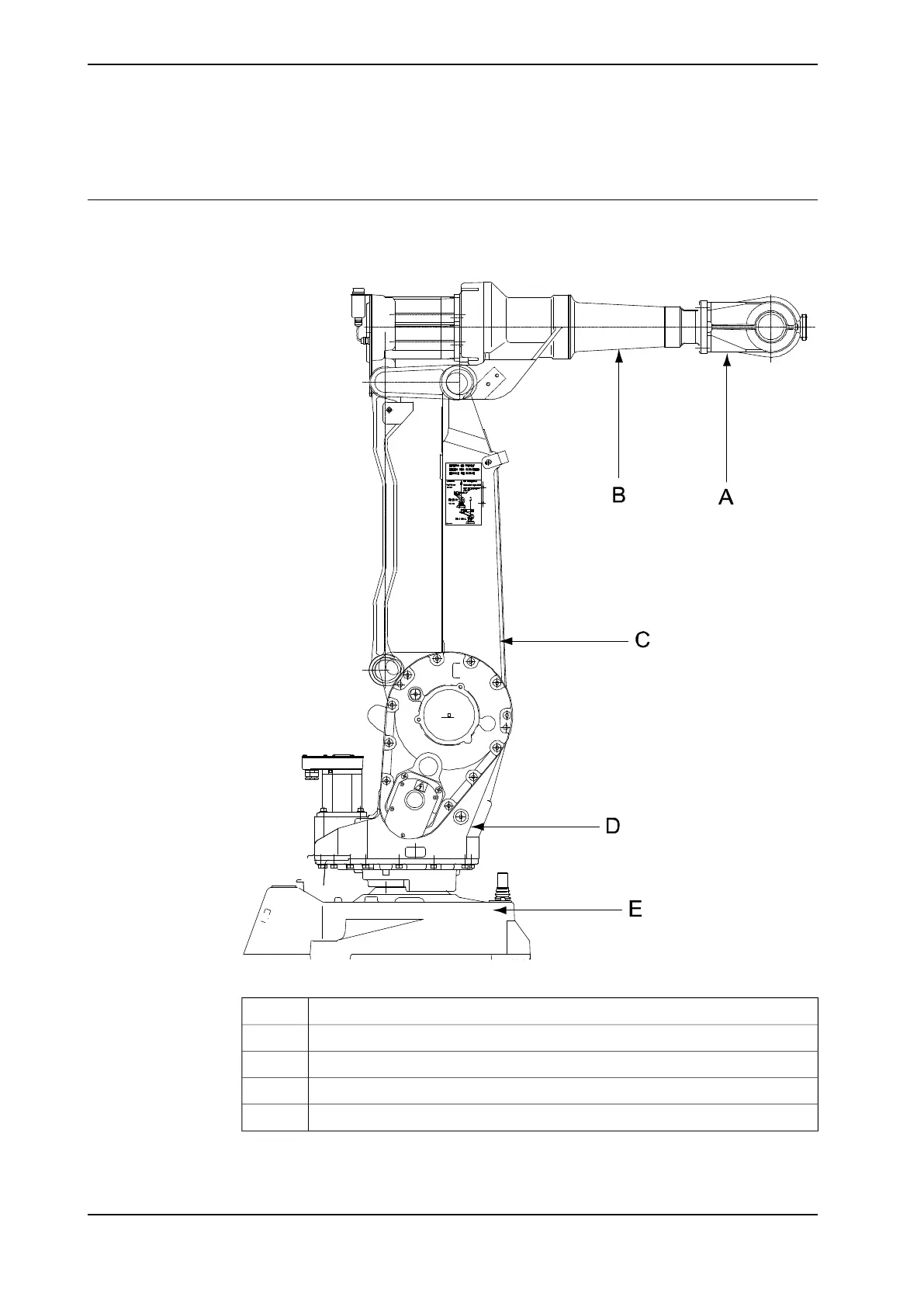
The wrist is defined as the axis 5 and 6 of the robot and shown in pos (A) in the
figure below.
xx0200000409
WristA
Upper armB
Lower armC
FrameD
BaseE
Continues on next page
138 Product manual - IRB 2400
3HAC022031-001 Revision: P
© Copyright 2004-2018 ABB. All rights reserved.
4 Repair
4.4.2 Replacement of wrist IRB 2400L
 Loading...
Loading...








