Rockwell Automation Publication 20C-PM001F-EN-P - March 2012 89
Application Notes Appendix B
Motor Overload
For single motor applications the drive can be programmed to protect the motor
from overload conditions. An electronic thermal overload I
2
T function emulates
a thermal overload relay. This operation is based on three parameters; [Motor NP
FLA], [Motor OL Factor] and [Motor OL Hertz] (parameters 042, 048 and 047,
respectively).
[Motor NP FLA] is multiplied by [Motor OL Factor] to allow the user to define
the continuous level of current allowed by the motor thermal overload. [Motor
OL Hertz] is used to allow the user to adjust the frequency below which the
motor overload is derated.
The motor can operate up to 102% of FLA continuously. If the drive had just
been activated, it will run at 150% of FLA for 180 seconds. If the motor had been
operating at 100% for over 30 minutes, the drive will run at 150% of FLA for 60
seconds. These values assume the drive is operating above [Motor OL Hertz],
and that [Motor OL Factor] is set to 1.00.
Operation below 100% current causes the temperature calculation to account for
motor cooling.
[Motor OL Hertz] defines the frequency where motor overload capacity derate
should begin. The motor overload capacity is reduced when operating below
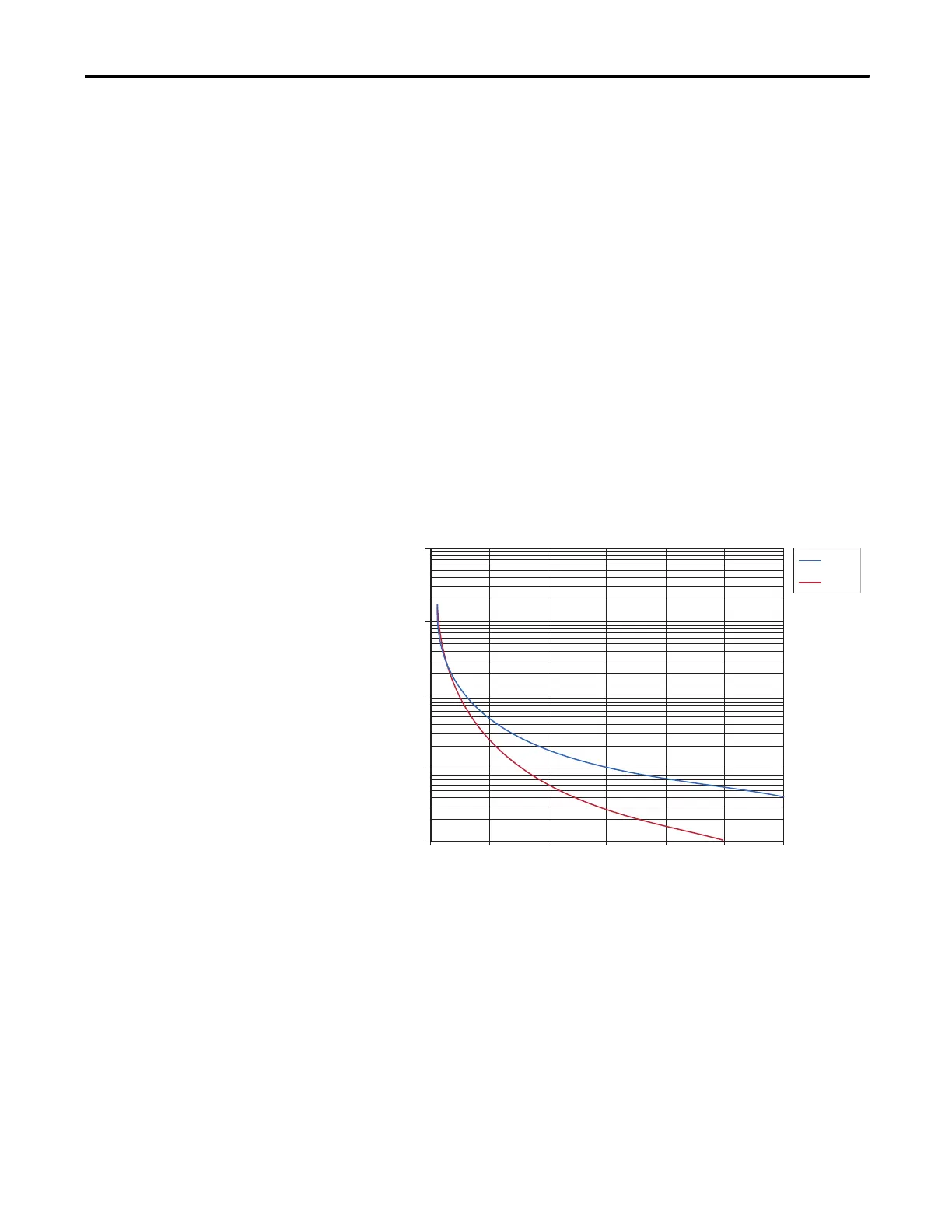
Motor Overload Curve
100 125 150 175 200 225 250
Full Load Amps (%)
Trip Time (Sec)
Cold
Hot
10
100
1000
10000
100000

 Loading...
Loading...










