MAJOR SYSTEM COMPONENTS
Processor Module (PSIO-1) —
This module is an
upgrade to the original PSIO (8088) module, with superior
electrical noise immunity capability. It contains the operat-
ing software and controls the operation of the machine. It
has 12 input channels and 6 output channels.
The PSIO-1 continuously monitors input/output channel
information received from all the modules and controls all
output signals for all output channels. It also controls the
relays on the six-pack relay board. The processor module
also controls the EXD driver module (as required), com-
manding it to open or close each EXD in order to maintain
the proper cooler level. Information is transmitted between
the processor module, CPM modules, the EXD driver mod-
ule, and the HSIO-II standard display module through a 3-wire
communications bus called COMM3. The remote enhanced
display (accessory) is connected to the PSIO-1 module through
a 3-wire communications bus, but uses a different commu-
nication bus called COMM1. The COMM1 bus is also used
to communicate to other CCN (Carrier Comfort Network)
devices when the unit is installed in a network application.
DSIO-HV Relay Module — The DSIO-HV module has
4 inputs and 8 outputs and is installed on 30GX units only.
The module communicates the status of the inputs with the
PSIO-1 module and operates the oil heater, outdoor fan, and
minimum load control outputs.
Electronic Expansion Device Module — The elec-
tronic expansion device module has 4 inputs and 2 outputs.
It receives signals from the PSIO-1 module and operates the
electronic expansion devices. The electronic expansion de-
vice module also sends the PSIO-1 module the status of its
4 input channels.
Compressor Protection Module (CPM) — The com-
pressor protection module monitors several of the compres-
sor safeties and controls 4 of the outputs used to control each
compressor. The CPM monitors compressor current, com-
pressor voltage, high pressure switch status, and compressor
motor temperature. The CPM controls the compressor con-
tactors, oil solenoid, and motor cooling solenoid. Each CPM
sends the PSIO-1 its circuit’s motor temperature, alarm sta-
tus of the module, and the compressor relay status.
PSIO-2 (8052) Module — This module is used as an
input/output module only, as there is no unit software loaded
in the module. This module has 12 input channels and 6 out-
put channels.
Keypad and Display Module (Also Called
HSIO-II) —
This device consists of a keypad with 8 func-
tion keys, 4 operative keys, 12 numeric keys, and a 2-line
24-character alphanumeric LCD (liquid crystal display). Key
usage is explained in the Accessing Functions and Subfunc-
tions section on page 13.
Control (LOR) Switch — Control of the chiller is de-
fined by the position of the LOCAL/OFF/REMOTE (LOR)
switch. This is a 3-position manual switch that allows the
chiller to be put under the control of its own controls (LO-
CAL), manually stopped (OFF), or controlled through a set
of remote contacts (REMOTE). This switch is different than
the switch that is used in the Flotronic™ II controls con-
figuration. The CCN control is enabled through the HSIO-II.
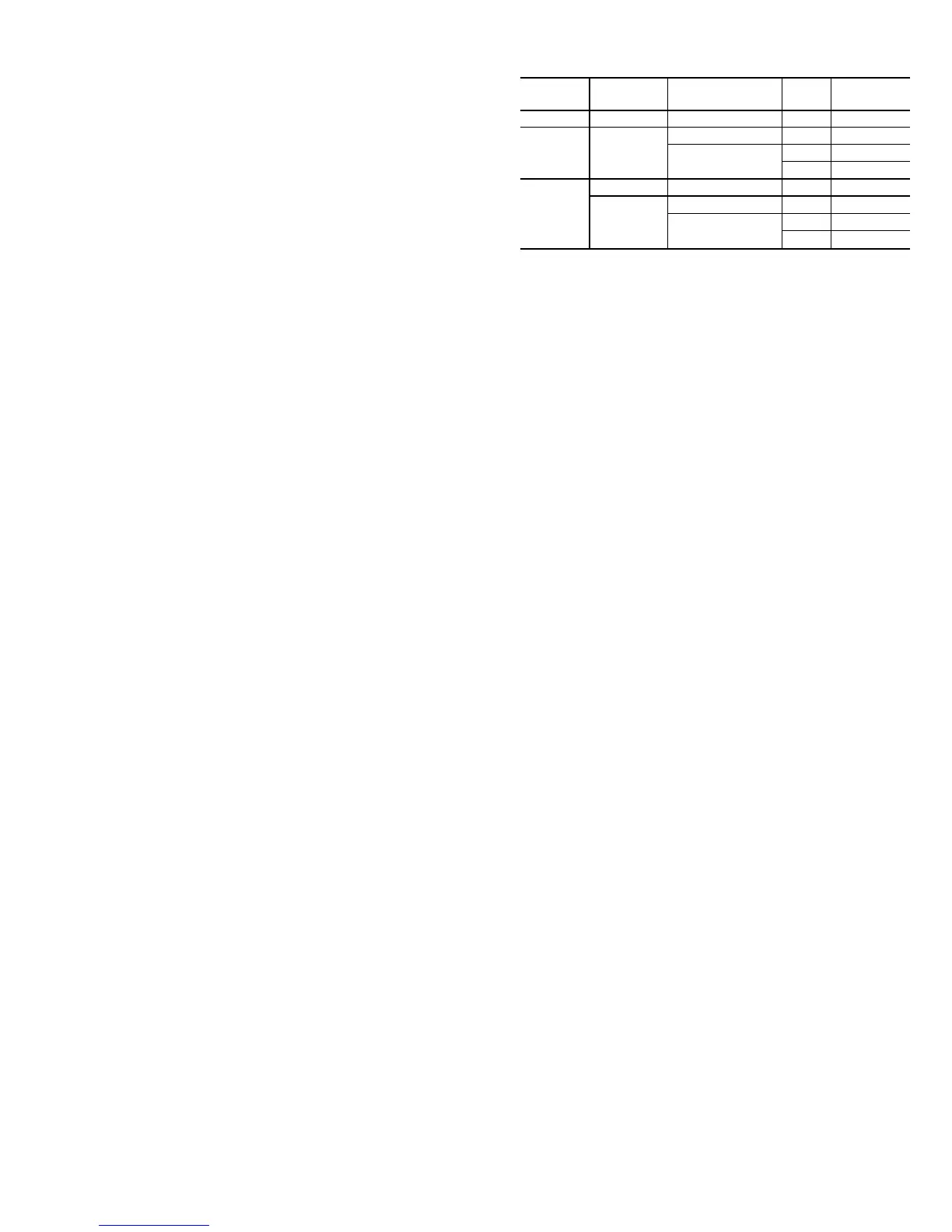
The switch allows unit operation as shown in Table 1.
In the LOCAL position, the chiller is allowed to operate
and respond to the scheduling configuration, CCN configu-
ration, and set point data. In the remote position, the unit
operates similarly to the LOCAL position, except the remote
contacts must be closed for the unit to operate.
Table 1 — Unit Mode from LOR Switch
and CCN State
SWITCH
POSITION
REMOTE
CONTACTS
CCN
CONFIGURATION
CCN
STATE
UNIT
MODE
OFF NR NR NR LOCAL OFF
LOCAL NR
DISABLE NR LOCAL ON
ENABLE
RUN CCN ON
STOP CCN OFF
REMOTE
OPEN NR NR LOCAL OFF
CLOSED
DISABLE NR LOCAL ON
ENABLE
RUN CCN ON
STOP CCN OFF
LEGEND
CCN — Carrier Comfort Network
NR — Input Not Read by Processor
NOTE: If the unit is configured for a clock, then the unit is under clock
control if it is in an ON mode.
OPERATION DATA
Electronic Expansion Device (EXD) —
The micro-
processor controls the EXD through the EXD driver mod-
ule. The EXD will either be an EXV (electronic expansion
valve) or an economizer. Inside both these devices is a linear
actuator stepper motor.
EXV OPERATION — High-pressure liquid refrigerant en-
ters the valve through the bottom. A series of calibrated slots
are located inside the orifice assembly. As refrigerant passes
through the orifice, the pressure drops and the refrigerant
changes to a 2-phase condition (liquid and vapor). To con-
trol refrigerant flow for different operating conditions, the
sleeve moves up and down over the orifice, thereby chang-
ing orifice size. The sleeve is moved by a linear stepper mo-
tor. The stepper motor moves in increments and is controlled
directly by the processor module. As the stepper motor ro-
tates, motion is transferred into linear movement by the lead
screw. Through the stepper motor and lead screw, 1500 dis-
crete steps of motion are obtained. The large number of steps
and long stroke result in very accurate control of refrigerant
flow.
Each circuit has a liquid level sensor mounted vertically
in the top of the cooler shell. The level sensor consists of a
small electric resistance heater and 3 thermistors wired in
series, positioned at different heights inside the body of the
well. The heater is designed so that the thermistors read ap-
proximately 200 F (93.3 C) in dry air.As the refrigerant level
rises (falls) in the cooler, the resistance of the closest ther-
mistor(s) will increase (decrease) as it is cooled by the rising
liquid refrigerant (heated by the heater). This large resis-
tance difference allows the control to accurately maintain a
specified level.
The level sensor monitors the refrigerant liquid level in
the cooler and sends this information to the PSIO-1. At ini-
tial start-up, the EXV position is at zero.After that, the micro-
processor keeps accurate track of the valve position in order
to use this information as input for the other control func-
tions. The processor does this by initializing the EXVs at
start-up. The processor sends out enough closing pulses to
the valve to move it from fully open to fully closed, then
resets the position counter to zero. From this point on, until
the next initialization, the processor counts the total number
of open and closed steps it has sent to each valve.
3
 Loading...
Loading...