DigitAx User Guide
Issue code: dgxu4
10-2
Pr95 — Number of motor poles
Enter 4, 6 or 8 in Pr95 according to the
construction of the motor. (Default setting: 6)
If this parameter is changed, the following
procedure must be performed to make the change
take effect:
• Save the parameters (b99 = 1)
• Switch off the drive, and wait 10 seconds
• Switch on the drive
10.3 Protection parameters
Pr42 — Maximum current
Since servo applications require rapid acceleration
to a high speed, the motor must tolerate a short-
term current I
max
in excess of the continuous full load
current, I
nom
. I
max
may be lower than the rated
maximum current of the Drive, I
pk
. Pr42 is used to
limit the maximum current delivered by the Drive so
that I
max
for the motor is not exceeded.
Calculate the following:
Pr42
I
I
100
max
pk
==××
where:
I
pk
= Rated current of the Drive
I
max
= Maximum motor current
Enter this calculated value in Pr42.
Overcurrent
Ipk rating of Drive
I%
Range of Inom
50
Range of Imax
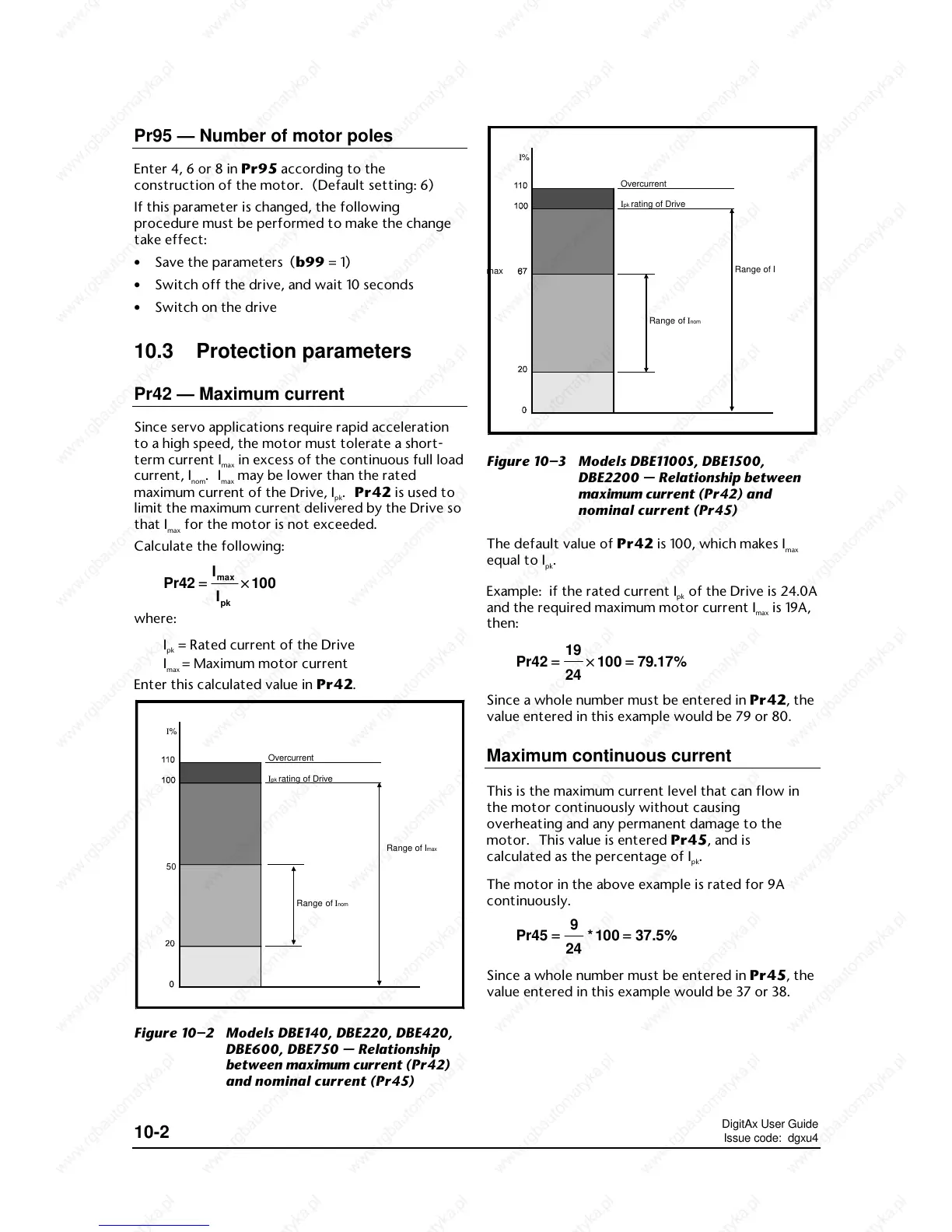
Figure 10–2 Models DBE140, DBE220, DBE420,
DBE600, DBE750 — Relationship
between maximum current (Pr42)
and nominal current (Pr45)
Overcurrent
Ipk rating of Drive
I%
Range of Inom
Range of I
max
Figure 10–3 Models DBE1100S, DBE1500,
DBE2200 — Relationship between
maximum current (Pr42) and
nominal current (Pr45)
The default value of Pr42 is 100, which makes I
max
equal to I
pk
.
Example: if the rated current I
pk
of the Drive is 24.0A
and the required maximum motor current I
max
is 19A,
then:
Since a whole number must be entered in Pr42, the
value entered in this example would be 79 or 80.
Maximum continuous current
This is the maximum current level that can flow in
the motor continuously without causing
overheating and any permanent damage to the
motor. This value is entered Pr45, and is
calculated as the percentage of I
pk
.
The motor in the above example is rated for 9A
continuously.

 Loading...
Loading...