DVC6000f Series
March 2006
5-92
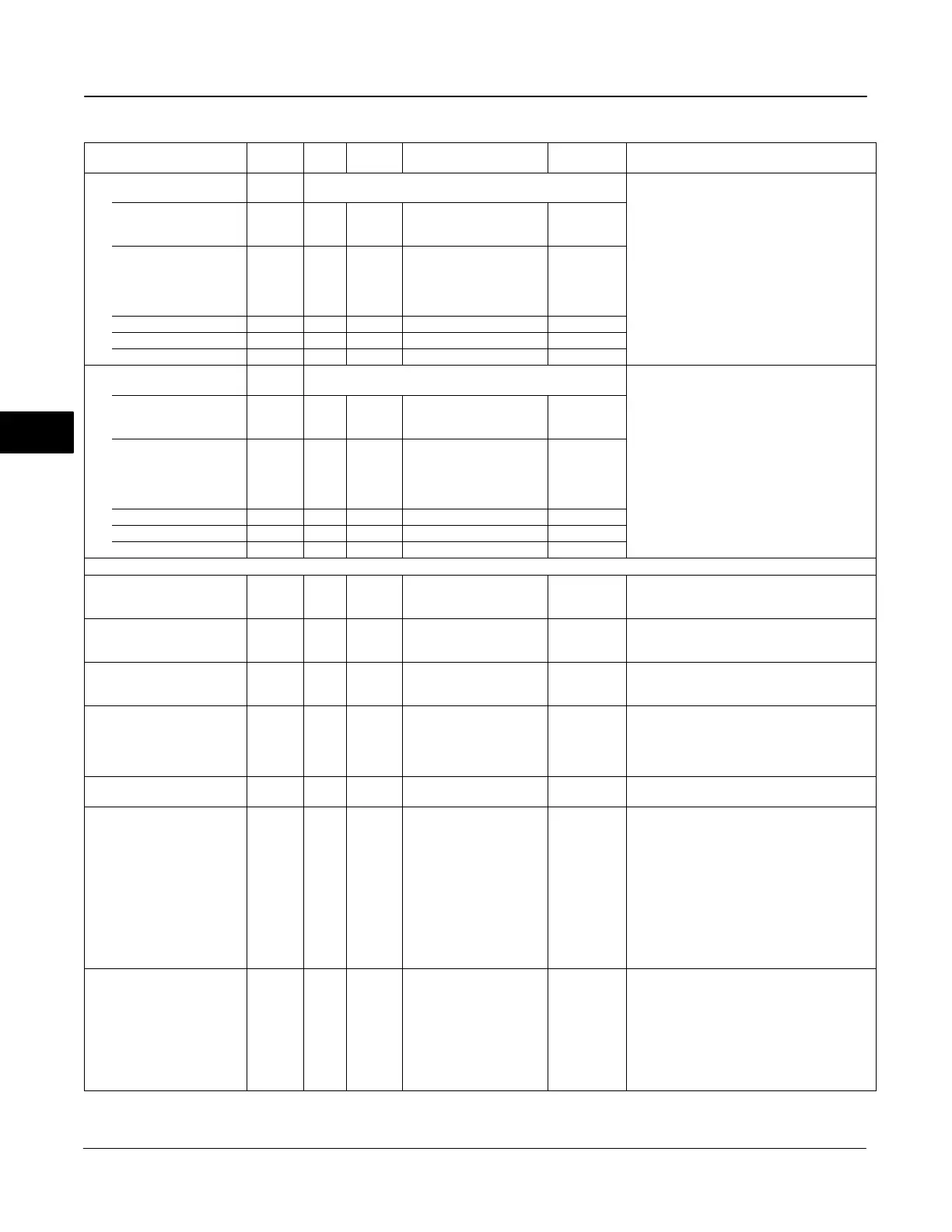
Table 5-31. PID Function Block System Parameters Definitions (Continued)
Label
PARAMETER_NAME
DescriptionInitial ValueRange
Block
Mode
RO /
RW
Index
Number
Deviation High Alarm
DV_HI_ALM
64
Data Type: DS-71
The DV HI alarm data, which includes a value of
the alarm, a timestamp of occurrence, and the
state of the alarm.
VALUE Data Type: Float
UNACKNOWLEDGED 64.1 RW N/A
0=Undefined
1=Acknowledged
2=
Unacknowledged
0=undefined
ALARM_STATE 64.2 RO N/A
0=Undefined
1=Clear reported
2=Clear not reported
3=Active reported
4=Active not reported
0=undefined
TIME_STAMP 64.3 RO N/A 0
SUBCODE 64.4 RO N/A 0
VALUE 64.5 RO N/A 0
Deviation Low Alarm
DV_LO_ALM
65
Data Type: DS-71
The DV LO alarm data, which includes a value of
the alarm, a timestamp of occurrence, and the
state of the alarm.
VALUE Data Type: Float
UNACKNOWLEDGED 65.1 RW N/A
0=Undefined
1=Acknowledged
2=
Unacknowledged
0=undefined
ALARM_STATE 65.2 RO N/A
0=Undefined
1=Clear reported
2=Clear not reported
3=Active reported
4=Active not reported
0=undefined
TIME_STAMP 65.3 RO N/A 0
SUBCODE 65.4 RO N/A 0
VALUE 65.5 RO N/A 0
Extended Parameters
Bias
BIAS
66 ALL OUT_SCALE +/− 10% 0
Data Type: Float
The bias value used to calculate output for a PD
structure.
Error
ERROR
67 RO N/A Dynamic
Data Type: Float
The error (SP−PV) used to determine the control
action.
SP Work
SP_WRK
68 RO N/A Dynamic
Data Type: Float
The working set point of the block after limiting
and filtering is applied. EU of PV_SCALE
SP FTime
SP_FTIME
69 ALL Positive 0
Data Type: Float
The time constant of the first-order SP filter. It is
the time, in seconds, required for a 63 percent
change in the IN value. Applied after SP rate
limiting.
Math Form
MATHFORM
70 OOS
0=Standard
1=Series
0=Standard
Data Type: Unsigned8
Selects equation form (series or standard)
Structureconfig
STRUCTURECONFIG
71 OOS
0=PID terms on error
1=PI terms on error, D term
on PV
2=I terms on error, PD term
on PV
3=PD terms on error
4= P term on error, D term
on PV
5=ID terms on error
6=I term on error, D term
on PV
7=2 Deg. of Freedom PID
0=PID terms
on error
Data Type: Unsigned8
Defines PID equation structure to apply controller
action.
UGamma
GAMMA (ugamma)
72 OOS > = 0, < = 1 1.0
Data Type: Float
Fraction of derivative action taken on error
versus PV. For a value of 0.6, then 60% of the
derivative action will be based on error and 40%
on PV. The value of GAMMA may be changed
over a range of 0−1 if STRUCTURE is set to Two
Degrees of Freedom Control. Otherwise, it is
automatically set to a value of 1 or 0 based on
the Structure selection.
−Continued−
5

 Loading...
Loading...





