C8 Maintenance 4. Cable Unit
258 C Series Maintenance Manual Rev.2
Removal: Cable unit (M/C cable downward)
1. Move the Manipulator to the origin posture (0 pulse position).
2. Turn OFF the Controller.
3. Turn the Manipulator laterally.
CAUTION
■
When turning the Manipulator laterally, there must be two or more people to work
on it so that at least one of them can support the arm while the
others are removing
Removing the bolts without supporting the arm may result in the arm falling, bodily
injury, and/or malfunction of the robot system.
4. Remove the covers and plate indicated below.
Arm #4 side covers (both sides) Arm #4 maintenance cover (C8XL only)
Arm #3 cover Arm #3 maintenance cover
Arm #2 side covers (both sides) Arm #1 side covers (both sides)
Arm #1 center cover Base cover (M/C cable downward)
Base maintenance cover Connector plate (M/C cable downward)
For details, refer to C8 Maintenance: 3. Covers.
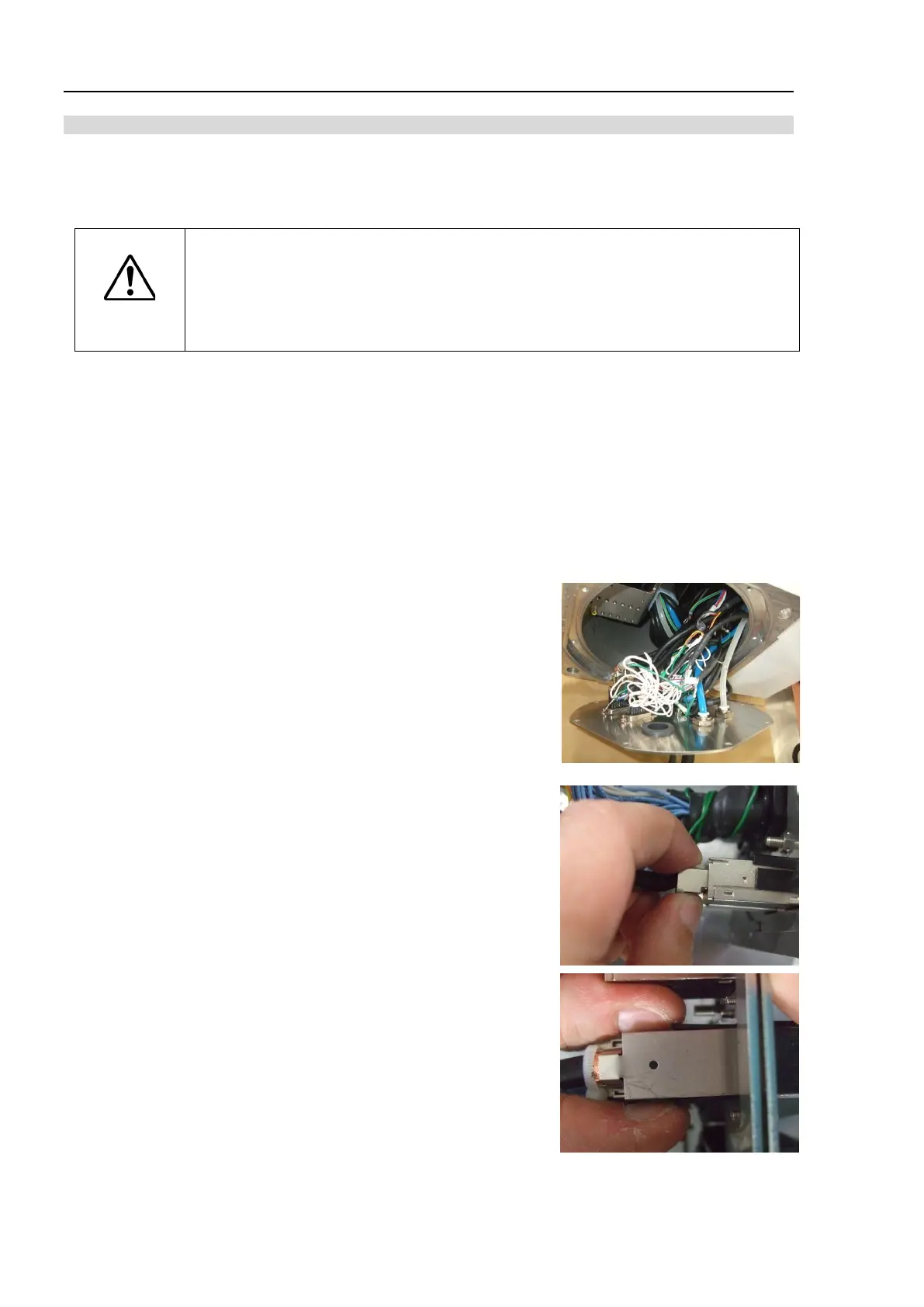
5. Remove the two air tubes in the base.
6. Remove the two D-sub connectors.
7. Disconnect the cable from the base and disconnect the following
connectors.
Connectors: X11, X12, X14, BR010, BR011, X010, X020,
X040, LED, GS01, BT1
(Hold the clip to remove.)
8. Disconnect the following connectors.
RJ45 connector:
Hold the clip to remove.
F-sensor connector:
Open the clips on the both ends of the connector
and pull it out.
 Loading...
Loading...







