C8 Maintenance 5. Joint #1
C Series Maintenance Manual Rev.2 279
Removal: Joint #1 Reduction gear unit (M/C Cable Backward)
CAUTION
■
This procedure has possibility of hands and fingers being caught
and/or damage
to the Manipulator. Be very careful when performing
■
the bolts while the Arm #2 is not tilted.
It may cause the belt come off and the Arm #2 falls down, and it is extremely
hazardous. Be sure to do the Removal steps
(1) and (2) in C8 Maintenance 6.1
- Replacing the Motor before removing the motor.
■
removing the Arm #1, there must be two or more people to work on it so
that at least one of them can support the arm while the others are
removing the
Removing the bolts without supporting the arm may result in the arm
falling, bodily injury, and/or malfunction of the robot
system.
1. Remove the following parts.
Connector plate
Connector
Cable grounding plate
Brake power supply
For details, refer to C8 Maintenance 5.1.3 Joint #1 - Replacing the Timing Belt (M/C Cable Backward),
Removal steps (1) to (9).
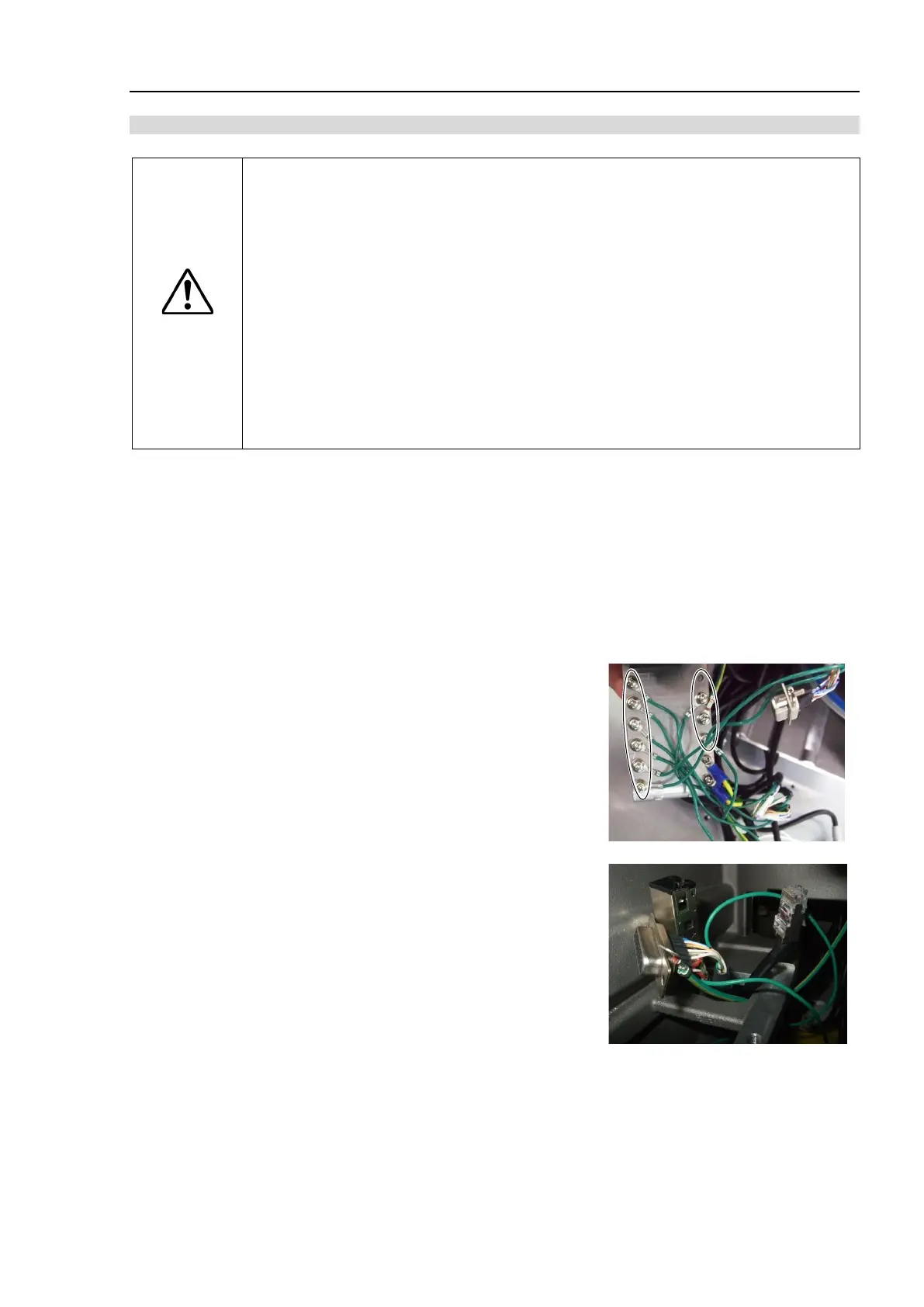
2. Remove the ground terminals.
Cross recessed head screws with washer
S, C models : 9-M4×8, 2-M3×6
P model : 10-M4×8, 2-M3×6
3. Disconnect the following parts from the hole inside the base.
D-sub cable
Ground wire
RJ45 connector
F-sensor connector
4. Remove the Joint #1 motor unit.
For details, refer to C8 Maintenance 5.1.1 Joint #1 – Replacing the Motor Unit (M/C Cable Backward),
Removal steps (6) to (7).
 Loading...
Loading...







