Chapter 6. Operation Mode and How to use
6-7
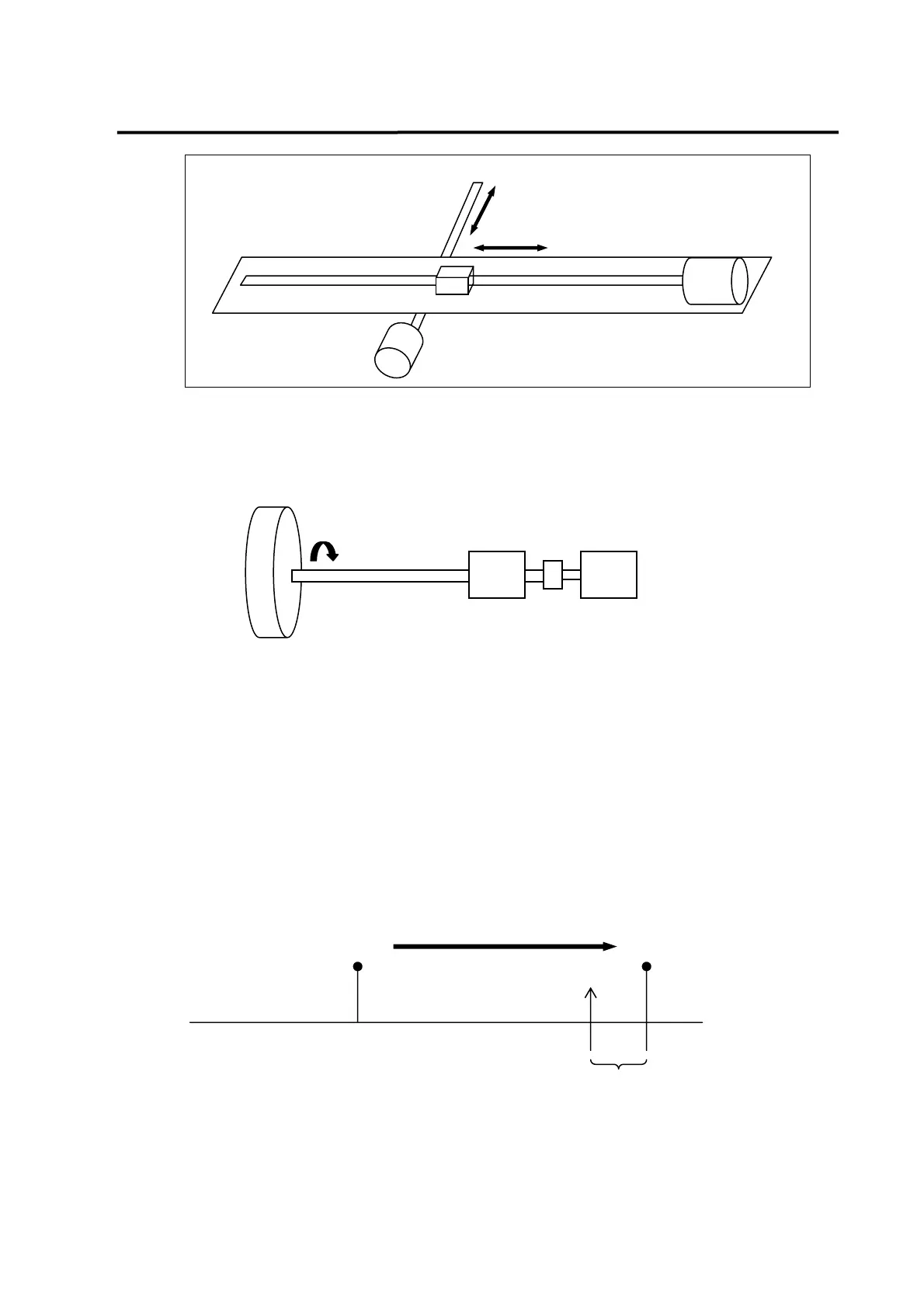
6.4.2 Rotary Coordinate Operation
1) Set machine momentum
ex) In case of 360 degree per ten rotations : Motor revolution quantity [P7-01]=10 & Device moving
quantity[P7-02]=360
2) Set moving direction[P7-03]
In case of CW, Coordinates value increases : 0
In case of CCW, Coordinates value increases : 1
3) Position completion signal: INPOS(Completion of position decision) : 46 No. terminal of CN1
As a set the position decision range [P4-02] can display completion signal within fixed range.
Start Stop
INPOS Output
Range of position selection
4) Continuous stopping time[P8-02]
In case of auto operation(continuous operation in order) can set stop time of each step.
Decelerator 1/10 servo motor
X axis
Y axis

 Loading...
Loading...