Chapter 6. Operation Mode and How to use
6-
6
6.4 How to use sequential operation.
1) Set machine momentum
ex) In case of 2[mm] pulse per rotation : Motor revolution quantity [P7-01]=5 & Device moving
quantity[P7-02]=10
2) Set moving direction[P7-03]
In case of CW, Coordinates value increases : 0
In case of CCW, Coordinates value increases : 1
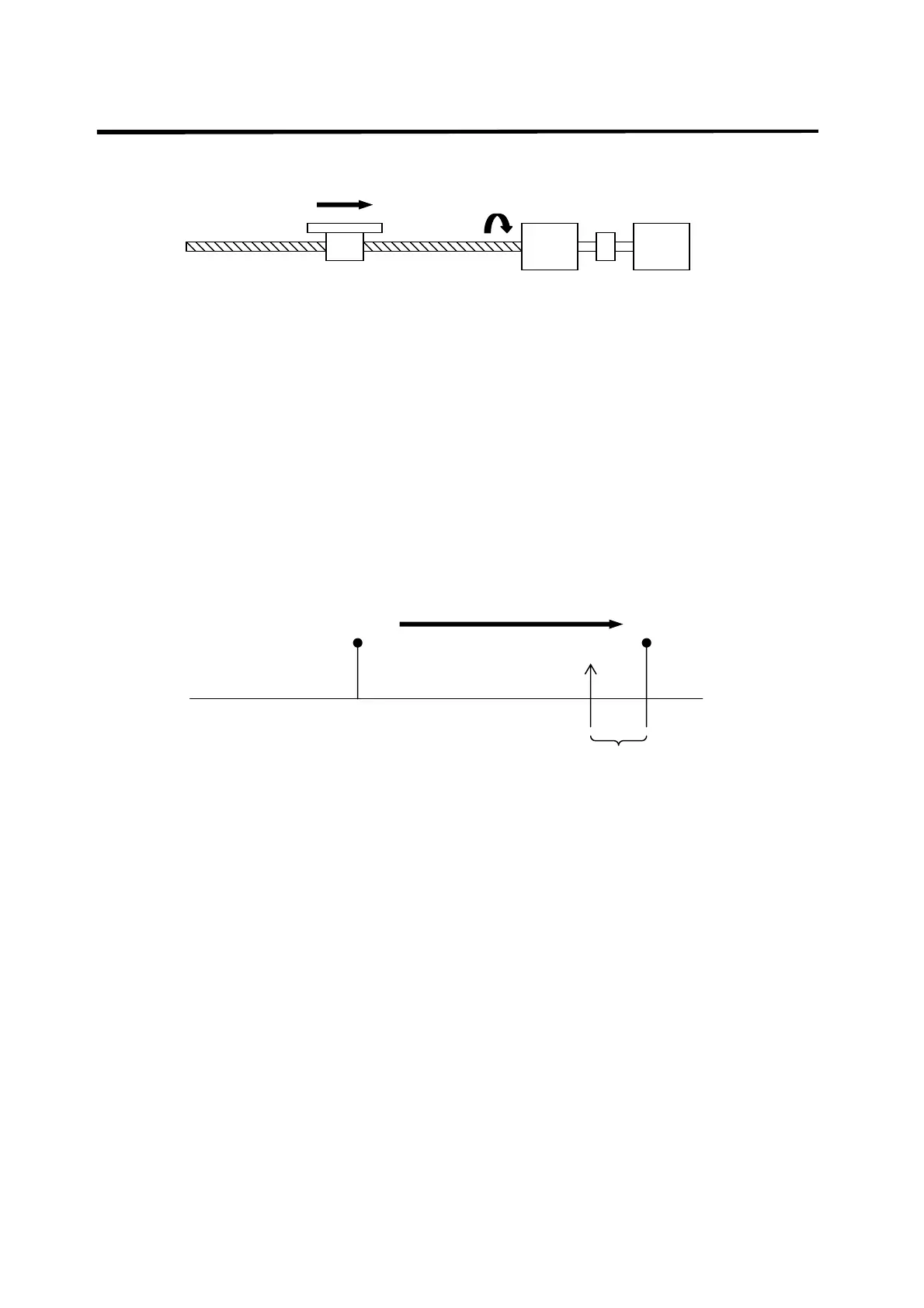
3) Position completion signal: INPOS(Completion of position decision) : 46 No. terminal of CN1
As a set the position decision range [P4-02] can display completion signal within fixed range.
Start Stop
INPOS Output
Range of position selection
4) Continuous stopping time[P8-02]
In case of auto operation(continuous operation in order) can set stop time of each step.
5) Main application field
In an axis or multiple axes machine which don't use interpolation function. input absolute position
value in parameters and execute sequential operation by START contact of ON
Manual operation mode : START contact=ON, 1 step operation
Auto operation mode : START contact=ON, continuously sequential operation
ex) Application to two axes Robot (Incase of simple coordinates movement operation)
Ball nut lead 10mm decelerator 1/20 servo motor

 Loading...
Loading...