Chapter8. Troubleshooting
8-2
8.2 Servo drive
If an alarm occurs, error signal output contact (Alarm) is turned OFF, and the motor stops by the
action of dynamic brake.
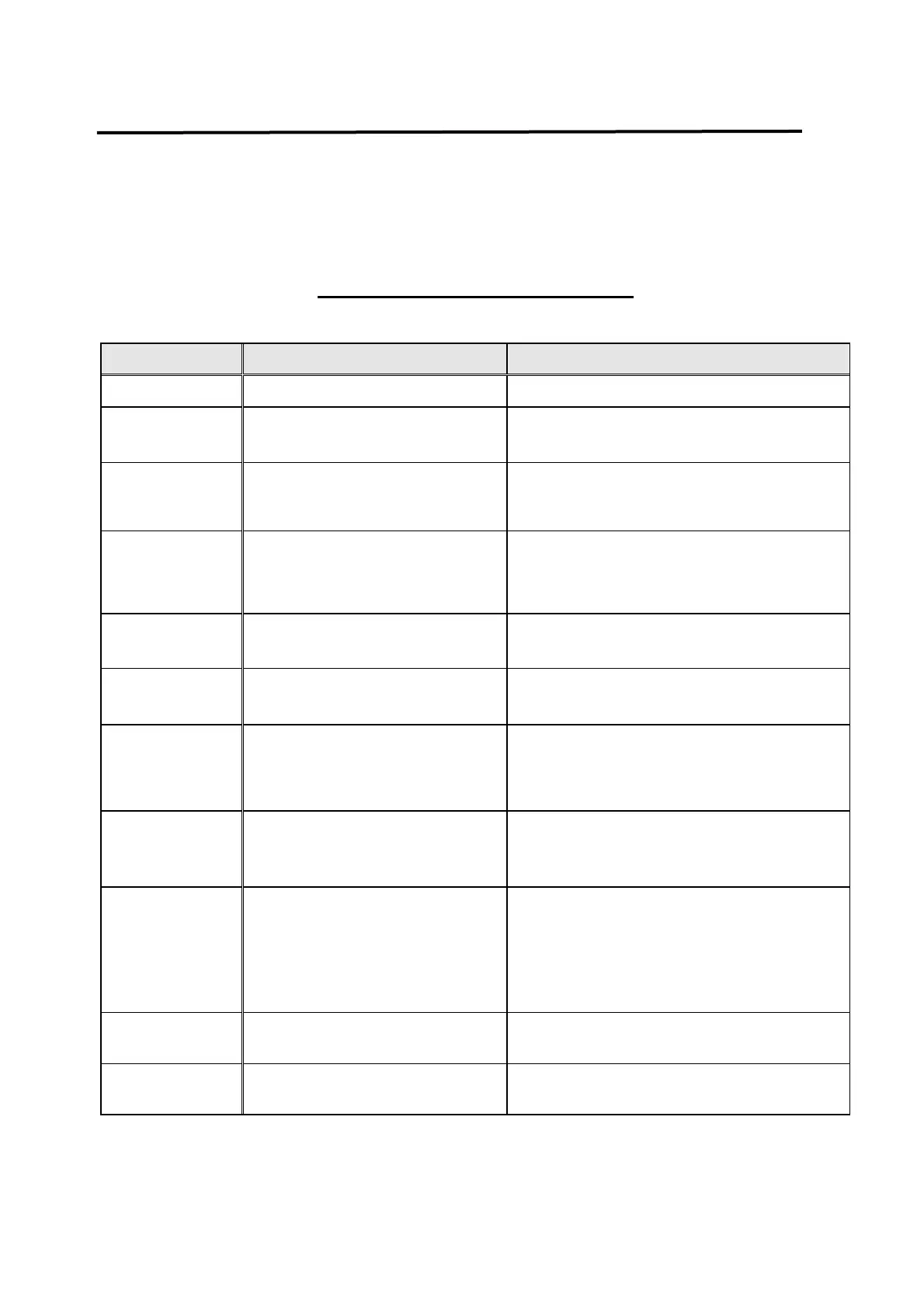
Actions to be taken in case of an alarm
Screen display Cause Corrective action
Normal
AL-00
EMER STOP
External ESTOP contact input
turned OFF.
Check external DC 24V power supply.
Check if the ESTOP contact is turned ON.
AL-01
OVER CURNT
Servo drive output terminal (U,
V, W) short-circuited, output
overcurrent.
Check the output terminal wiring.
Restart after resetting alarm.
Replace drive if O.C. continues.
AL-02
OVER VOLT
Input voltage excessive (greater
than 280V). Regeneration
control resistance burned.
Load GD
2
excessive.
Use input voltage lower than 230V.
Replace control resistance, increase
acceleration/deceleration time. Replace
servo drive.
AL-03
OVER LOAD
Mechanical overload.
Motor miswiring.
Check load condition.
Check the motor and encoder wiring.
AL-04
POWER FAIL
Main power shut off during Servo
ON status.
Check the 3-phase main power supply (R,
S, T) input status.
AL-05
LINE FAIL
Motor and encoder set value
error, motor and encoder
miswiring, defective encoder,
mechanical overload.
Check motor and encoder wiring and set
values.
Remove excessive load.
AL-06
OVER SPEED
Excessive gain, parameter set
value error, excessive gravity
load.
Adjust gain.
Check parameters (P3-14).
Remove excessive gravity load.
AL-07
FOLLOW ERR
Rapid acceleration/deceleration,
gain set value error, command
pulse frequency excessive
(higher than 300 kpps),
miswiring, mechanical overload.
Adjust position gain, increase menu (P4-
03) set value, adjust command pulse
frequency, check motor and encoder
wiring.
AL-08
OUTPUT NC
Output (U, V, W) open phase.
Check motor wiring.
Replace servo drive.
AL-09
PPR ERROR
No. of encoder pulse set error.
Set the number of encoder pulse (P1-12)
accurately.

 Loading...
Loading...