7
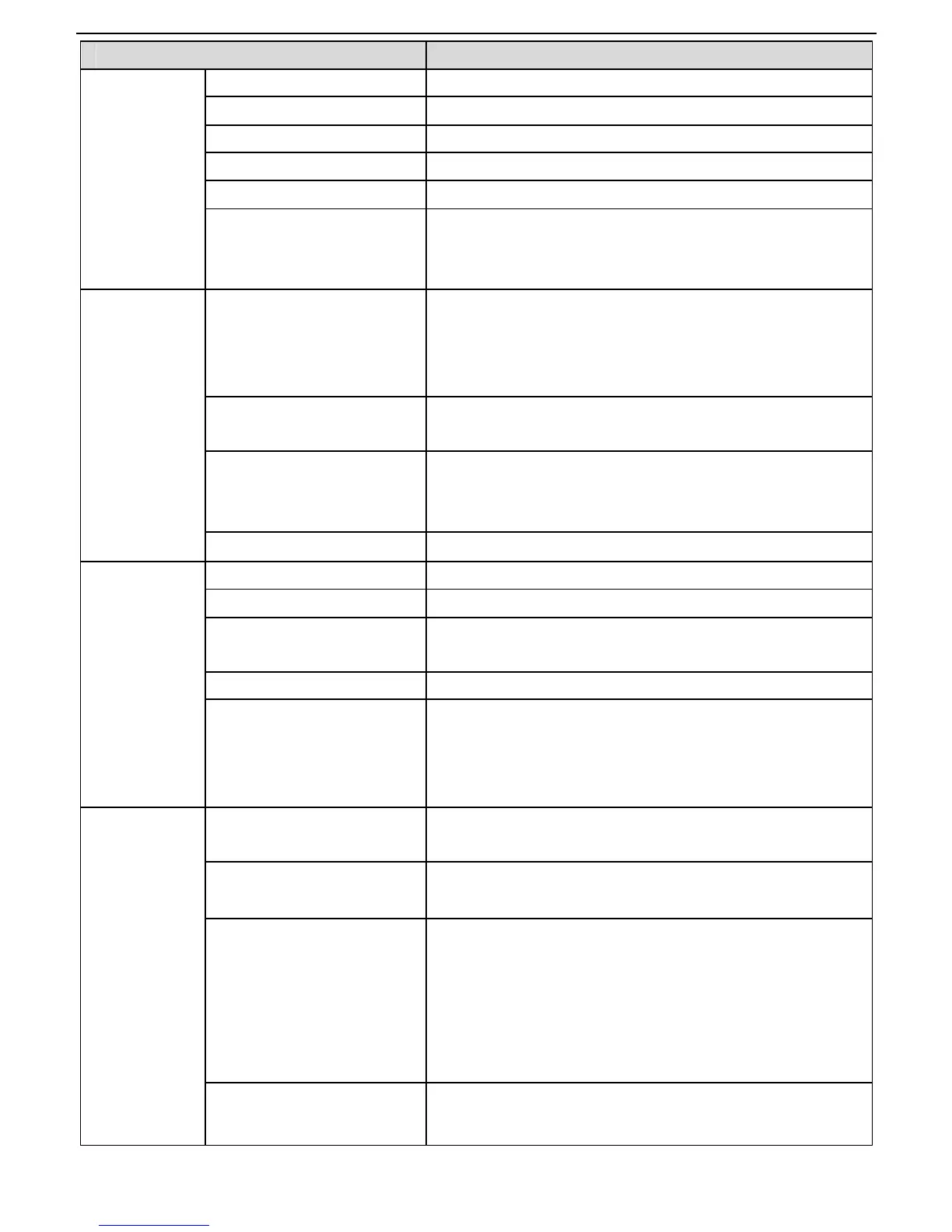
Function Specification
Speed control accuracy ±0.2% (SVC)
Speed fluctuation ± 0.3% ( SVC)
Torque response <20ms (SVC)
Torque control accuracy
10%
Starting torque 0. 5Hz/150% ( SVC)
Overload capability
150% of rated current: 1 minute
180% of rated current: 10 seconds
200% of rated current: 1 second
Running
control
feature
Frequency setting method
Digital setting, analog setting, pulse frequency setting,
multi-step speed running setting, simple PLC setting, PID
setting, MODBUS communication setting
Shift between the set combination and set channel.
Auto-adjustment of the
voltage
Keep a stable voltage automatically when the grid voltage
transients
Fault protection
Provide comprehensive fault protection functions:
overcurrent, overvoltage, undervoltage, overheating,
phase loss and overload, etc.
Start after speed tracking
Smoothing starting for running motor
Peripheral
interface
Analog input 1 (AI2) 0~10V/0~20mA and 1 (AI3) -10~10V
Analog output 2 (AO1, AO2) 0~10V/0~20mA
Digital input
4 common inputs, the Max. frequency: 1kHz;
1 high speed input, the Max. frequency: 50kHz
Digital output 1 Y1 terminal output
Relay output
2 programmable relay outputs
RO1A NO, RO1B NC, RO1C common terminal
RO2A NO, RO2B NC, RO2C common terminal
Contact capacity: 3A/AC250V
Others
Temperature of the
running environment
-10~50°C, derate 1% for every additional 1℃ when
above 40℃
DC reactor
Standard embedded DC reactor for the inverters ( ≥
18.5kW)
Installation mode
Wall and rail installation of the inverters(single phase
220V/three phase 380V, ≤2.2KW and three phase 220V,
≤0.75KW)
Wall and flange installation of the inverters(three phase
380V, ≥4KW and three phase 220V, ≥1.5KW)
Braking unit
Standard for the inverters≤37kW and optional for the
inverters of 45~110kW
 Loading...
Loading...