6
11
KEB COMBIVERT F5-M / S12
Name: Basis
06.05.04
Chapter Section Page Date
© KEB Antriebstechnik, 2002
All Rights reserved
Functional Desription Positioning and Synchronous Control
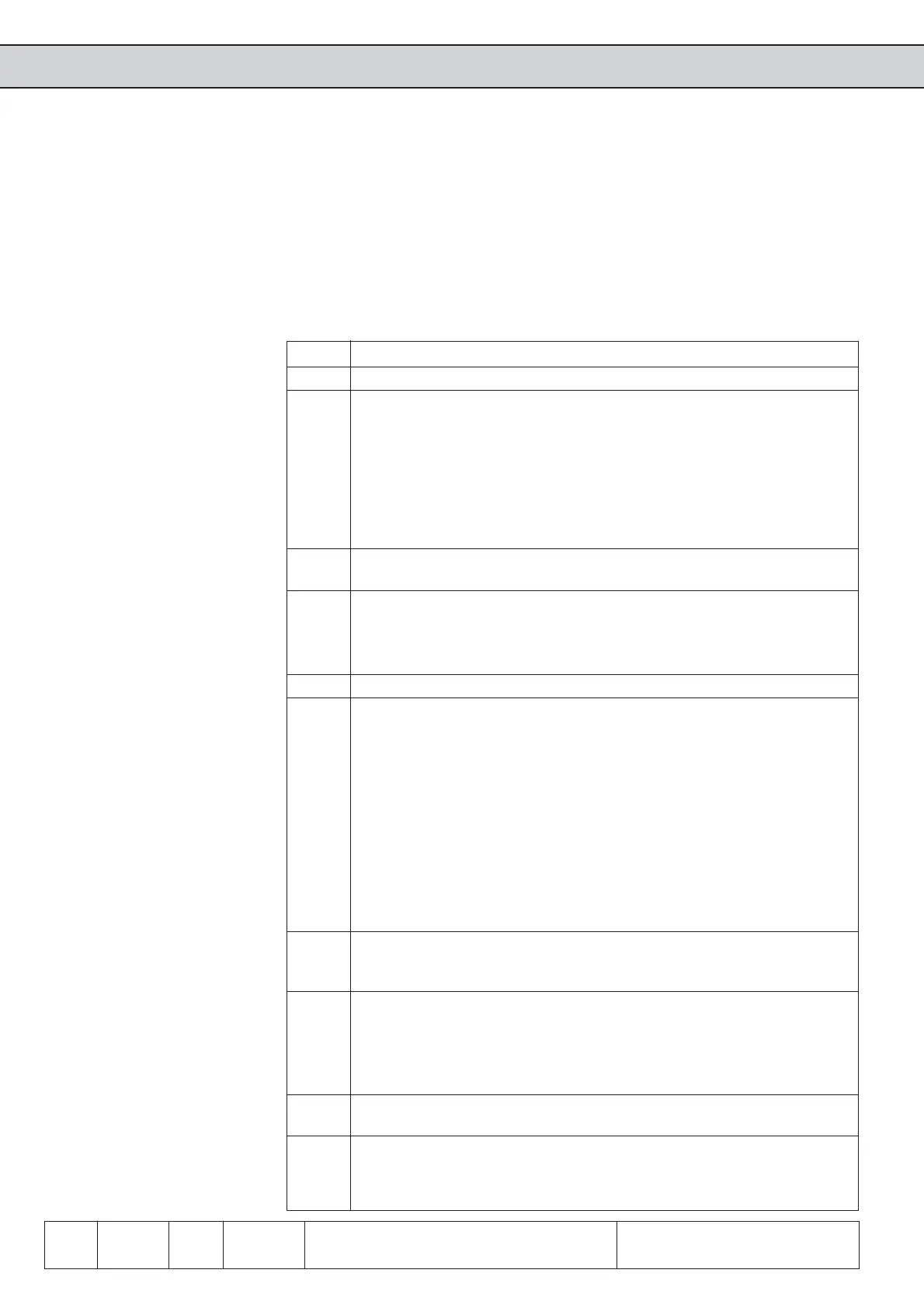
6.11.7 Posi Control
PS.0 Posi/Synchronous Mode
Bit 0...2 Activation of the Posi or Synchronous Mode
0 Off; Posi or Synchronous Mode switched off; Position standstill controller
(PS.6) not active. The drive runs controlled, speed- or torque-controlled
(depending on CS.0).
1 Synchronous Mode
2..4 reserved (off)
5 Posi Mode
6 Contouring mode
7 Activation by control word
Bit 3 Abort of positioning; this bit defines whether the active positioning can
be interrupted by a new Start-Posi-signal (PS.29).
0 Off; a new Start-Posi-signal is ignored.
8 On; with the Start-Posi-signal the current positioning is aborted and a
new profile with the starting index (PS.28) is started. In case of relative
positioning the position refers to the actual position.
Bit 4 Positioning-/target speed
0 PS.25/PS.25; the maximum positioning speed and the target speed are
preset with PS.25. The positioning speed is determined by the current
index - the target speed always by the subsequent index. The sign for
the target speed is determined from the position values. If the following
position lies in opposite direction, a target speed of 0 min
-1
is preset and
after reaching it it is continued with the maximum profile speed of the
subsequent index. If the profile was processed or interrupted, the target
speed is = 0 min
-1
.
16 PS.31/PS.25; the maximum positioning speed is preset with PS.31
within the range 0...100 % based on oP.10. The positioning speed is
displayed in ru.63 (ru.63 = PS.31 ï oP.10 [set] / 100%). The target speed
is determined by the respective index.
Bit 5 Behaviour at abort of positioning ñ an abort of the positioning can be
effected by opening the control release, by starting the fast stop function
or by error.
0 The current position index (ru.60) is reset onto the starting index
(PS.28), so that a new profile is started with a Start-Posi-command.
32 The interrupted positioning is continued, if the Posi Mode was not
switched off (PS.0) and input PS.2 remains set. This also applies to the
Power-Off-function.
Bit 6 If the drive cannot reach a position within the preset ramp times, the
message îPosition not reachableì is output.
0 The drive is stopped.
64 A positioning onto the target is tried again.
The Posi Mode incorporates following features:
ï 16 positions iIndex 0...15)
ï Profile sequence programmable
ï absolute or relative positioning
ï Hardware- and/or software limit switches
The Posi Mode is adjusted by parameter PS.0 and the basic behaviour is defined.
Posi-/Synchron Mode (PS.0)
 Loading...
Loading...








