202 Section 10 Governor Adjustments TP-6356 4/12
6. Integral. Enter the value from the Governor
Parameter Summary.
The Integral value acts to drive the speed error to
zero. In a Proportional only control with constant
load, there will be a constant speed error that
inversely relates to the Proportional gain of the
system.
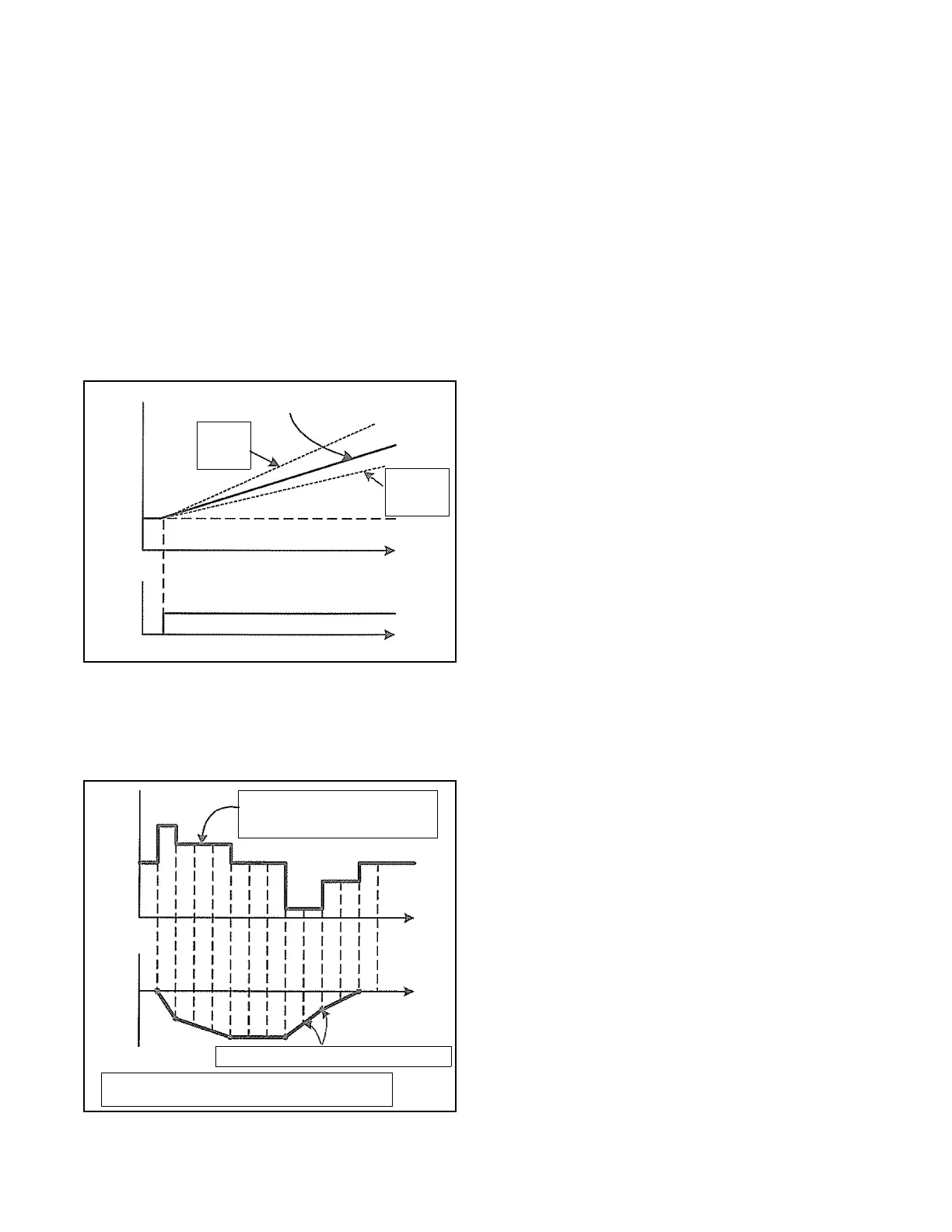
The Integral value is key to isochronous speed
control. This value eliminates the difference
between the programmed set speed and the
actual speed. The Integral gain changes the time
it takes to drive the error to zero. The Integral
value eliminates the speed offsets due to
Proportional gain and should not be set to zero.
See Figure 10-18.
TT-1399
Larger
Integral
value
Smaller
Integral
value
Controller output (%)
Time
Error
0%
50%
100%
Time
Integral response to constant error
Figure 10-18
Integral Value
7. Derivative. Enter the value from the Governor
Parameter Summary. See Figure 10-19.
TT-1399
Derivative response to changes
in the rate of deceleration or the
rate of acceleration.
When the rate of change changes (red dot), the
Derivative’s impact on controller output changes.
The error is sampled at regular intervals.
Controller output (%)
Time
Error
(--)
(+)
0
0%
50%
100%
Time
Figure 10-19 Derivative Value
The Derivative responds to the rate of change in
the speed error. This parameter is primarily used
to dampen very rapid oscillations resulting from
large speed changes. The Derivative responds to
engine acceleration or deceleration. When the
engine speed approaches the target speed at a
fast rate, the Derivative acts to minimize or
eliminate overshoot. A zero value is allowed but
systems typically require some Derivative gain to
improve overall engine speed control.
8. Overall Gain (OVG) @ S et Speed A. Set the
default setting from the Governor Parameter
Summary.
This gain value acts as a multiplier on the three
Proportional, Integral, and Derivative (PID) values
of Speed A.
9. Overall Gain (OVG) @ Set Speed B (load share
model only). Use the default value.
This gain value acts as a multiplier on the three
PID values of Speed B.
10. Overall Gain (OVG) @ Idle. Enter the value from
the Governor Parameter Summary.
This gain value acts as a multiplier on the three
PID values when the Idle Speed is the active
target speed. The Idle Speed set point is active
only during startup when the Idle Hold Timer is
running.
11. Gain Factor. Enter the value from the Governor
Parameter Summary.
The Gain Factor permits more range of
adjustment from the PID values. When any of the
PID reaches their adjustment limit, the Gain
Factor can be modified for more range of the PID
and OVG values.
12. Speed Filter. Enter the value from the Governor
Parameter Summary.
This value indicates the number of speed signal
pulses to use when calculating an average engine
speed and is used to dampen out speed
measurement variations that can make PID tuning
difficult.
Too much filtering slows down the governor’s
response to speed change and too little filtering
can make the governor overly sensitive and tuning
difficult. As a general rule, less filtering is needed
when the number of engine cylinders increases
because there is less time for the engine speed to
slow down before the next engine cylinder firing.

 Loading...
Loading...
