8.4.5 Speed controller
The speed controller is automacally set if one of the following opmisaons is carried out:
4Motor selecon from motor catalogue ^ 144
4Automac motor idencaon (energized) ^ 146
4Automac motor calibraon (non-energized) ^ 147
For typical applicaons, a manual adaptaon of the parameters of the speed
controller is not recommended. A wrong seng may have a negave eect on
the control. For special applicaons, contact the manufacturer before adapng
the parameters.
Details
The speed controller has an inuence in the following motor control types:
•
Sensorless control (SL PSM)
•
Sensorless vector control (SLVC)
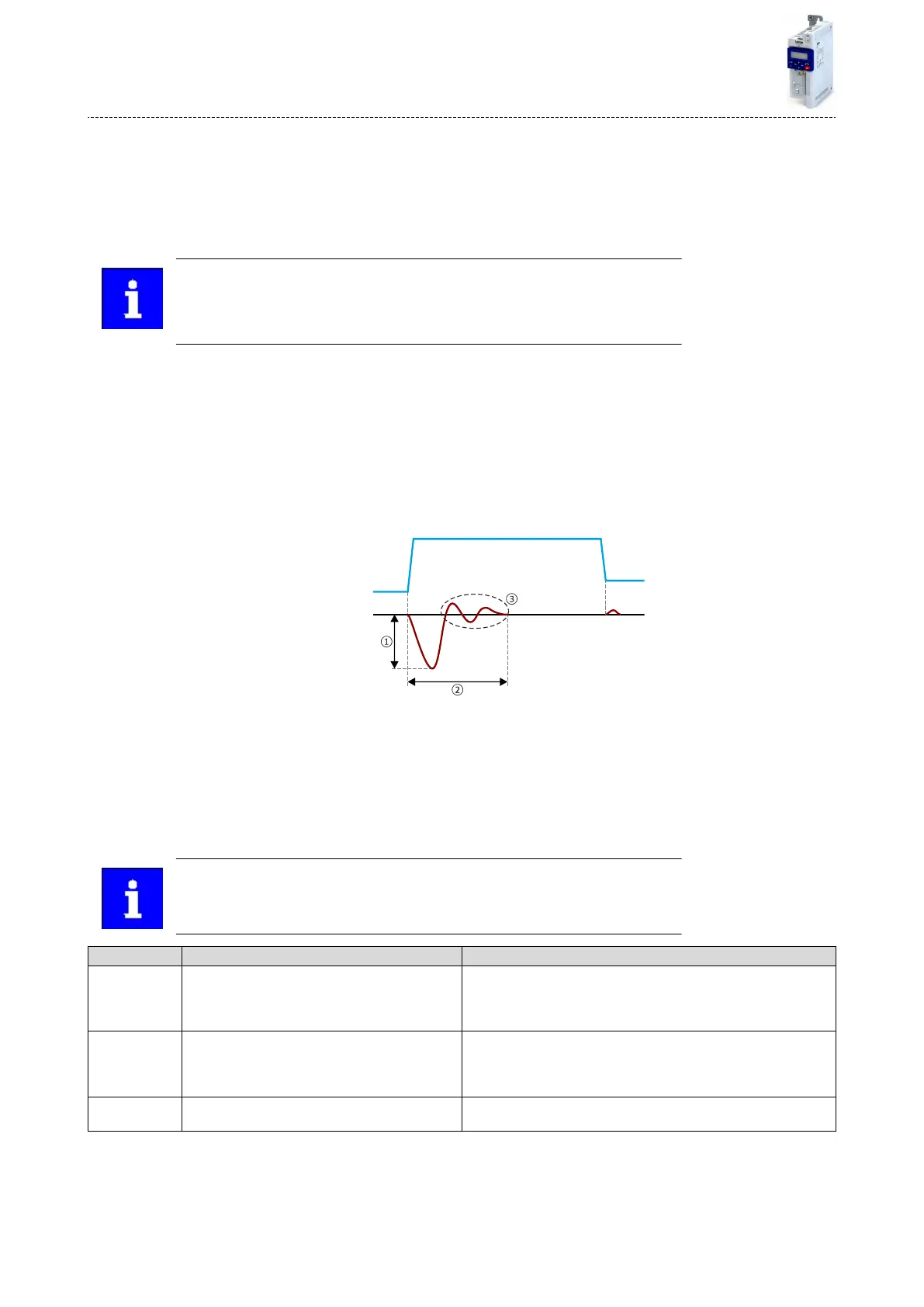
The automacally calculated sengs for the speed controller enable an opmal control
behaviour for typical load requirements:
•
Minimum speed loss
①
•
Minimum seling me
②
•
Minimum overshoot
③
Speed
Load requirement
Speed setpoint
Seng notes
If oscillaons occur during operaon aer high load requirements:
•
Reduce gain of the speed controller in 0x2900:001 (P332.01).
•
Increase reset me of the speed controller in 0x2900:002 (P332.02).
If the speed loss is too high or the seling me too long during operaon with high load
requirements:
•
Increase gain of the speed controller in 0x2900:001 (P332.01).
If the gain is set too high or the reset me too low, the speed control loop can
become unstable!
Parameter Name / value range / [default seng] Info
0x2900:001
(P332.01)
Speed controller sengs: Gain
(Speed controller: Gain)
0.00000 ... [0.00193]* ... 20000.00000 Nm/rpm
* Default seng depending on the size.
Gain factor Vp of the speed controller.
0x2900:002
(P332.02)
Speed controller sengs: Reset me
(Speed controller: Reset me)
1.0 ... [80.0]* ... 6000.0 ms
* Default seng depending on the size.
Reset me Ti of the speed controller.
0x2904 Actual speed lter me
0.0 ... [2.0] ... 50.0 ms
Filter me for the actual speed value.
Motor control
Opmisaon of the control loops
Speed controller
158
 Loading...
Loading...





