2-9
Definition of specifications
2 Robot arm
2.2.2 Rated load (mass capacity)
The robot's mass capacity is expressed solely in terms of mass, but even for tools and works of similar mass,
eccentric loads will have some restrictions. When designing the tooling or when selecting a robot, consider the fol
-
lowing issues.
(1) The tooling should have the value less or equal than the smaller of the tolerable inertia and the tolerable
moment found in
Page 5, "Table 2-1 : Tab Standard specifications of robot"
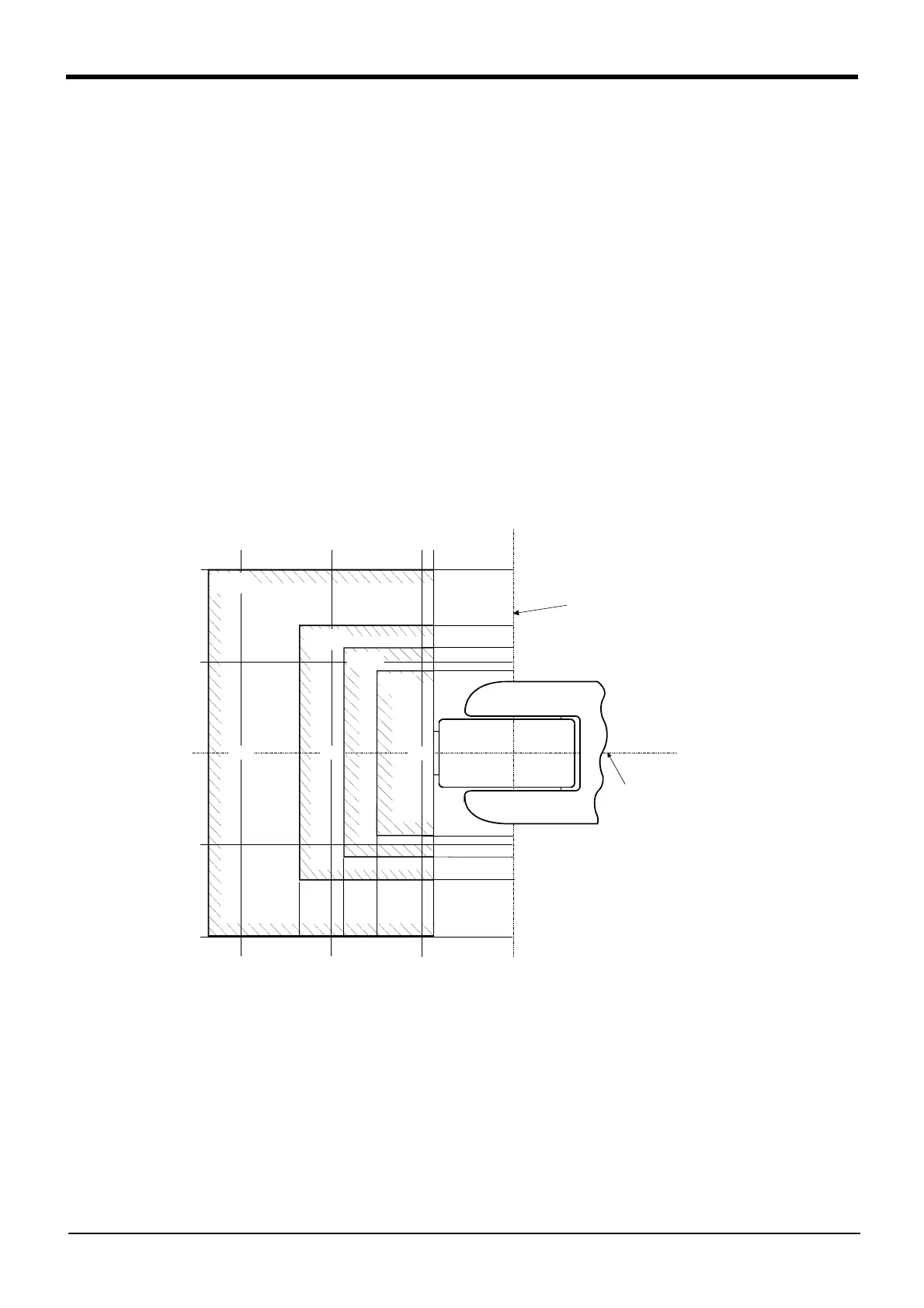
(2) Fig. 2-1shows the distribution dimensions for the center of gravity in the case where the volume of the load
is relatively small. Use this figure as a reference when designing the tooling.
(3) When the load is not mass, but force, you should design the tooling so that it does not exceed the value for
allowable moment described in
Page 5, "Table 2-1 : Tab Standard specifications of robot"
[Caution] The mass capacity is greatly influenced by the operating speed of the robot and the motion posture.
Even if you are within the allowable range mentioned previously, an overload or generate an overcurrnt
alarm could occur. In such cases, it will be necessary to change the time setting for acceleration/decel
-
eration, the operating speed, and the motion posture.
[Caution] The overhang amount of the load for the specified moment and inertia in this section is the dynamic
limit value determined by the motor driving each axis and by the capacity of the reduction gears. Con
-
sequently, accuracy cannot be guaranteed for the entire tooling area. Since accuracy is based on the
center point of the mechanical interface surface, position accuracy can diminish as you go away from
the flange surface, or vibration can result, with tooling that is not rigid or that is long.
Fig.2-1 : Position of center of gravity for loads (for loads with comparatively small volume)
100
100
115
115
140
140
200
200
185
230
330
0
Unit : mm
Rotation center for J6 axis
Rotation center for J5 axis
1.0kg
200
300
100
2.0kg
3.0kg
85
98
98
155
3.5kg
 Loading...
Loading...




