2-19
Tooling
2 Robot arm
2.5 Tooling
2.5.1 Wiring and piping for hand
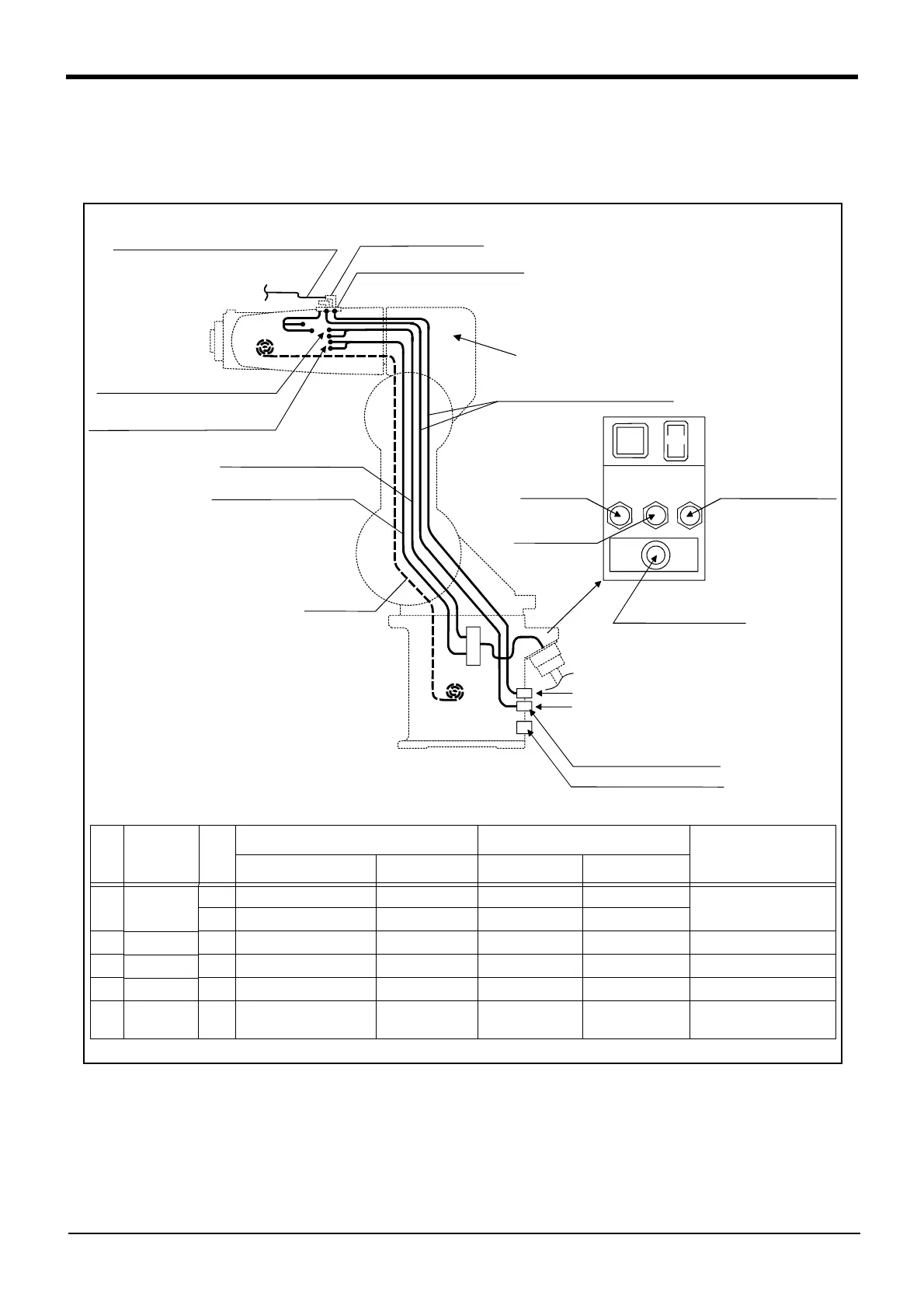
Shows the wiring and piping configuration for a standard-equipped hand.
Fig.2-7 : Wiring and piping for hand
Note) This part doesn't exist for the 5-axis
AIRIN(φ6)
RETURN(φ
6)
SPARE WIRE INLET
CN1 CN2
VACUUM(φ
8)
Note1
)
AIRIN
RETURN
Spare wiring
Hand output signal cable
Hand input signal cable
(3)Hand input signal connector
(4)Hand output signal connector
Secondary piping pneumatic hose (φ4)
(customer-prepared)
(1)φ4 quick coupling
Solenoid valve set (optional)
* Use by connecting it with the hand
output signal connector.
(2)φ6 quick coupling x 2
(5)φ8 quick coupling
Note1)
Primary piping pneumatic hose
Note1) For dust suction in the clean specification.
Connector and pneumatic coupling
No Name Qty.
Robot side (Robot arm side) Counter side (customer-prepared)
Manufacturer
Connectors, couplings Connector pins Connector Connector pins
(1) Coupling 4 KJW04-M3 - - - SMC Corporation
4 KJL04-M3 - - -
(2) Coupling 2 UKBL6 - - - Koganei Corporation
(3) Connector 2 1-1717834-3 1318108-1 1-1318115-3 1318112-1 Tyco Electronics AMP
(4) Connector 2 1-1717834-4 1318108-1 1-1318115-4 1318112-1 Tyco Electronics AMP
(5) Coupling
Note1)
1 UKBL8 - - - Koganei Corporation
 Loading...
Loading...




