73
CJ1M Functions Arranged by Purpose Section 1-9
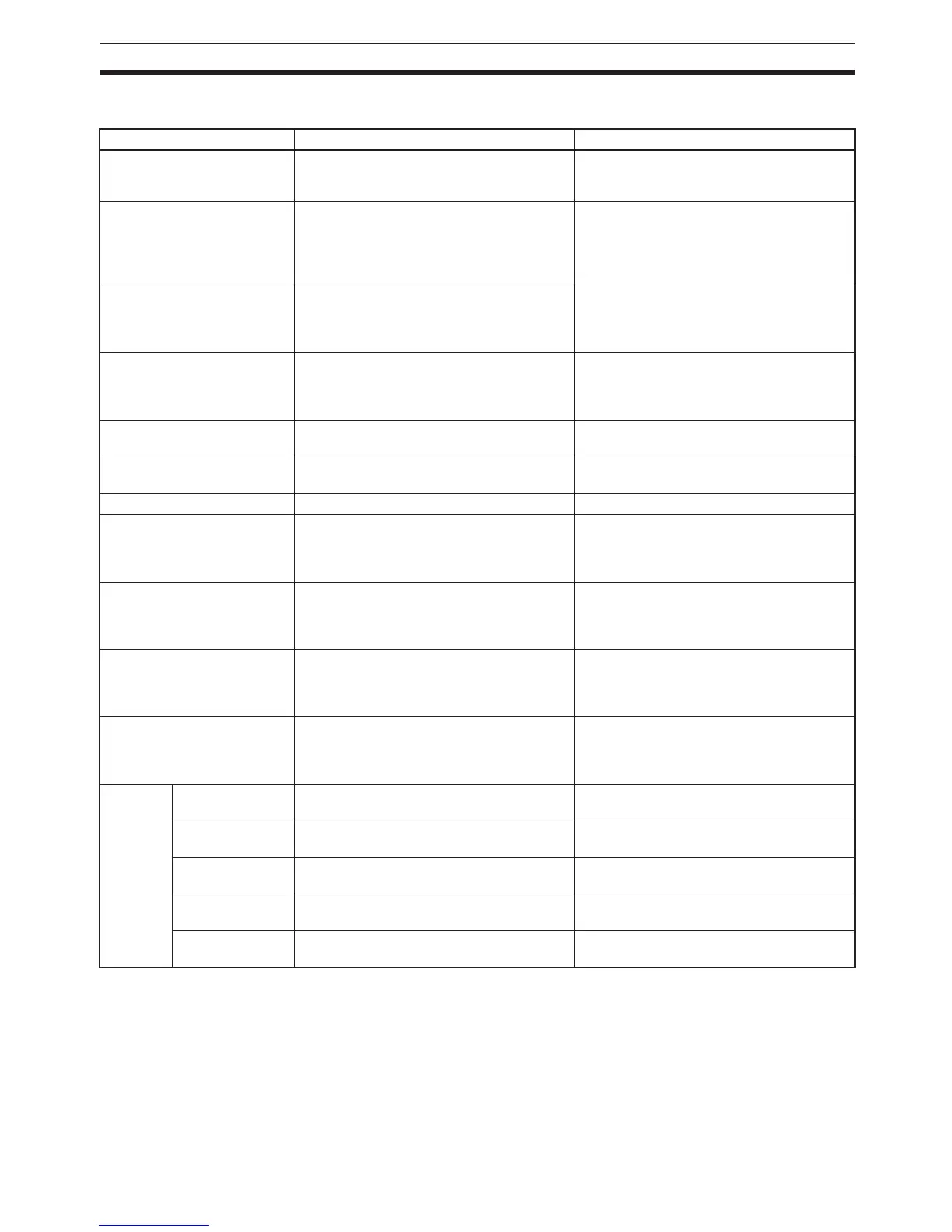
1-9-5 Comparison with the CJ1W-NC Pulse Outputs
Item CJ1M CJ1W-NC Position Control Unit
Control method Controlled with the ladder program's Pulse
Output instructions (SPED(885), ACC(888),
and PLS2(887)).
Controlled with the Start Command Bit (Rel-
ative Movement Command Bit or Absolute
Movement Command Bit).
Changing the speed during
positioning
When the SPED(885) instruction (indepen-
dent), ACC(888) instruction (independent),
or PLS2(887) instruction is in progress,
each instruction can be executed again to
change the speed.
Override
Changing the speed during
speed control
When the SPED(885) instruction (continu-
ous) or ACC(888) instruction (continuous) is
in progress, each instruction can be exe-
cuted again to change the speed.
Override
Jog operation External inputs can be used in the ladder
program to start and stop operation with the
ACC(888) instruction (continuous) and
SPED(885) instruction (continuous).
Controlled with the Jog Start Bit, Jog Stop
Bit, and Direction Specification Bit.
Origin search Controlled with the ladder program's
ORG(889) instruction.
Performed with the Origin Search Bit.
Origin return Controlled with the ladder program's
ORG(889) instruction.
Performed with the Origin Return Bit.
Teaching Not supported. Performed with the Teaching Start Bit.
Fixed distance feed interrupt
(Continuous output with posi-
tioning)
Execute positioning with the PLS2(887)
instruction during a speed control operation
started with SPED(885) (continuous) or
ACC(888) (continuous).
Performed with the Fixed Distance Feed
Interrupt Start Bit.
Change the target position
during positioning.
(Multiple Start)
When a PLS2(887) instruction is being exe-
cuted, another PLS2(887) instruction can
be started.
Performed with the Start Command Bit (Rel-
ative Movement Command Bit or Absolute
Movement Command Bit) during direct
operation.
Decelerate to a stop during
positioning.
Execute an ACC(888) (independent)
instruction during a positioning operation
started with ACC(888) (independent) or
PLS2(887).
Performed with the Decelerate to Stop Bit.
Decelerate to a stop during
speed control.
Execute an ACC(888) (continuous) instruc-
tion during a speed control operation
started with SPED(885) (continuous) or
ACC(888) (continuous).
Performed with the Decelerate to Stop Bit.
External
I/O
Origin Input Sig-
nal
A built-in input is used. Input through the Position Control Unit's
input terminal.
Origin Proximity
Input Signal
A built-in input is used. Input through the Position Control Unit's
input terminal.
Positioning Com-
pleted Signal
A built-in input is used. Input through the Position Control Unit's
input terminal.
Error Counter
Reset Output
A built-in output is used. Output through the Position Control Unit's
output terminal.
CW/CCW Limit
Input
A separate Input Unit is used and an Auxil-
iary Area bit is controlled from the program.
Input through the Position Control Unit's
input terminal.
 Loading...
Loading...




