1-2
Introduction to the System Configura-
tions
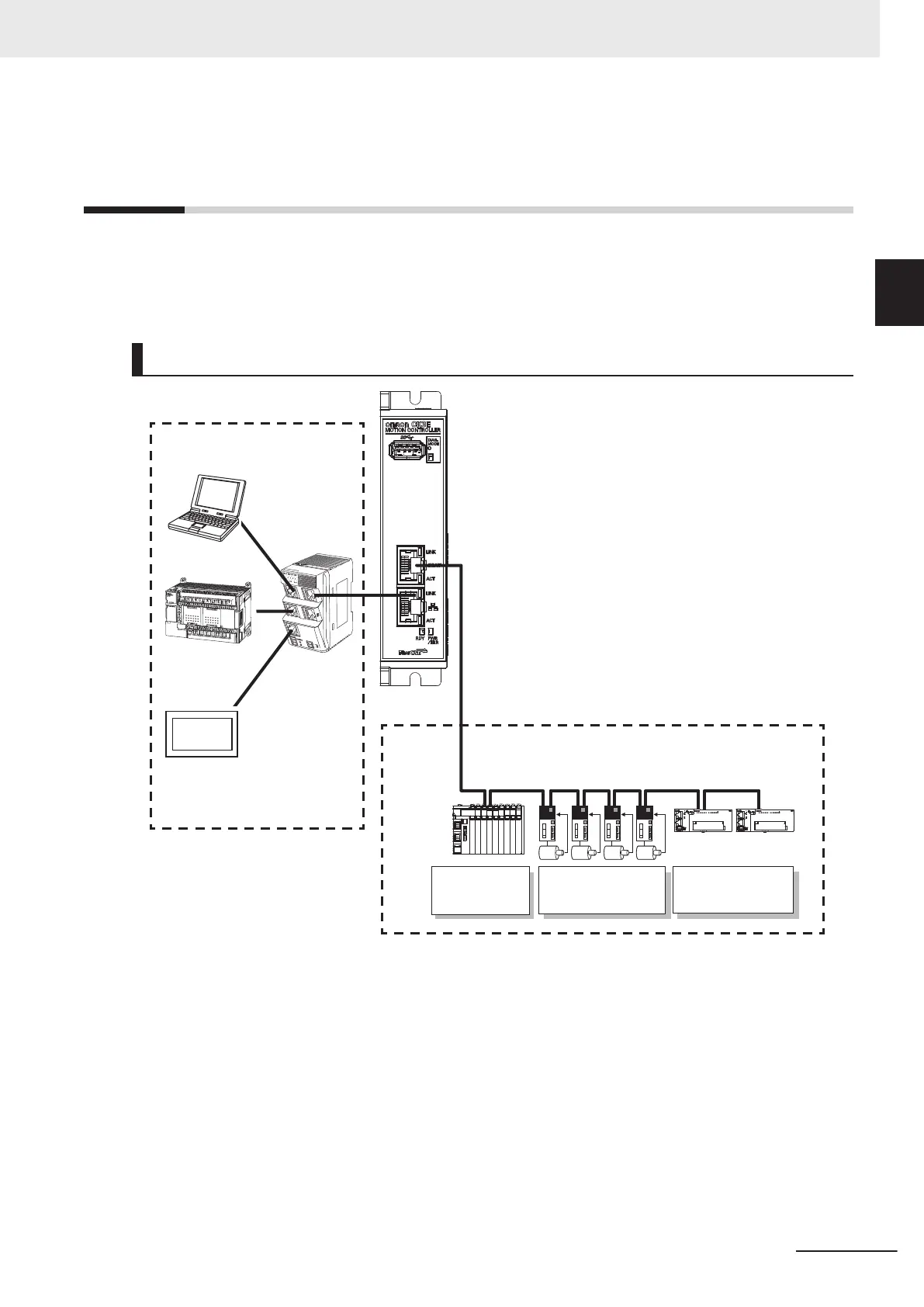
The Motion Controller supports the following system configurations.
The basic configurations include the EtherCAT network configuration, Ethernet network configuration,
and Support Software.
Basic Configuration
Slave
t
erminal
Servo drive/
Encoder input
slaves
General-purpose
slaves
EtherCAT network
CK3E-series Programmable
Multi-Axis Controller
Support Software
PLC
Industrial
Ethernet
switch
Programmable terminal
EtherNet/IP
Modbus-TCP
Ethernet network
EtherCAT Network Configuration
By using the EtherCAT master communications port on the Programmable Multi-Axis Controller,
EtherCAT slaves such as servo drives, inverters, machine vision systems, digital and analog I/O,
and other general-purpose slaves can be connected.
The Programmable Multi-Axis Controller also supports EtherCA
T Slave Terminals. The EtherCAT
Slave Terminal helps you to save space and construct flexible systems using a broad range of
types of NX Units.
However, when OMRON NX-series EtherCAT Coupler Units are used for the EtherCAT Slave Ter-
minal, there are restrictions on the models and unit versions of EtherCAT Coupler Units that can be
connected.
Refer to A-2 Restrictions on Using the NX-series EtherCAT Coupler Unit on page A-4 for details.
1 Features and System Configuration
1-3
CK3E-series Programmable Multi-Axis Controller User’s Manual Hardware (I610)
1-2 Introduction to the System
Configurations
1

 Loading...
Loading...








