4-5
Laying the EtherCAT Network
This section describes how to install EtherCAT networks.
4-5-1
Supported Network Topologies
The EtherCAT port of the Motion Controller enables daisy chain connection without branching and
branching using Junction Slaves. In addition, the ring wiring using Junction Slaves is available for CPU
Units with PMAC firmware revision version 2.7.0 or later.
Examples of topology without branching, with branching (Junction Slaves), and ring wiring are shown
below.
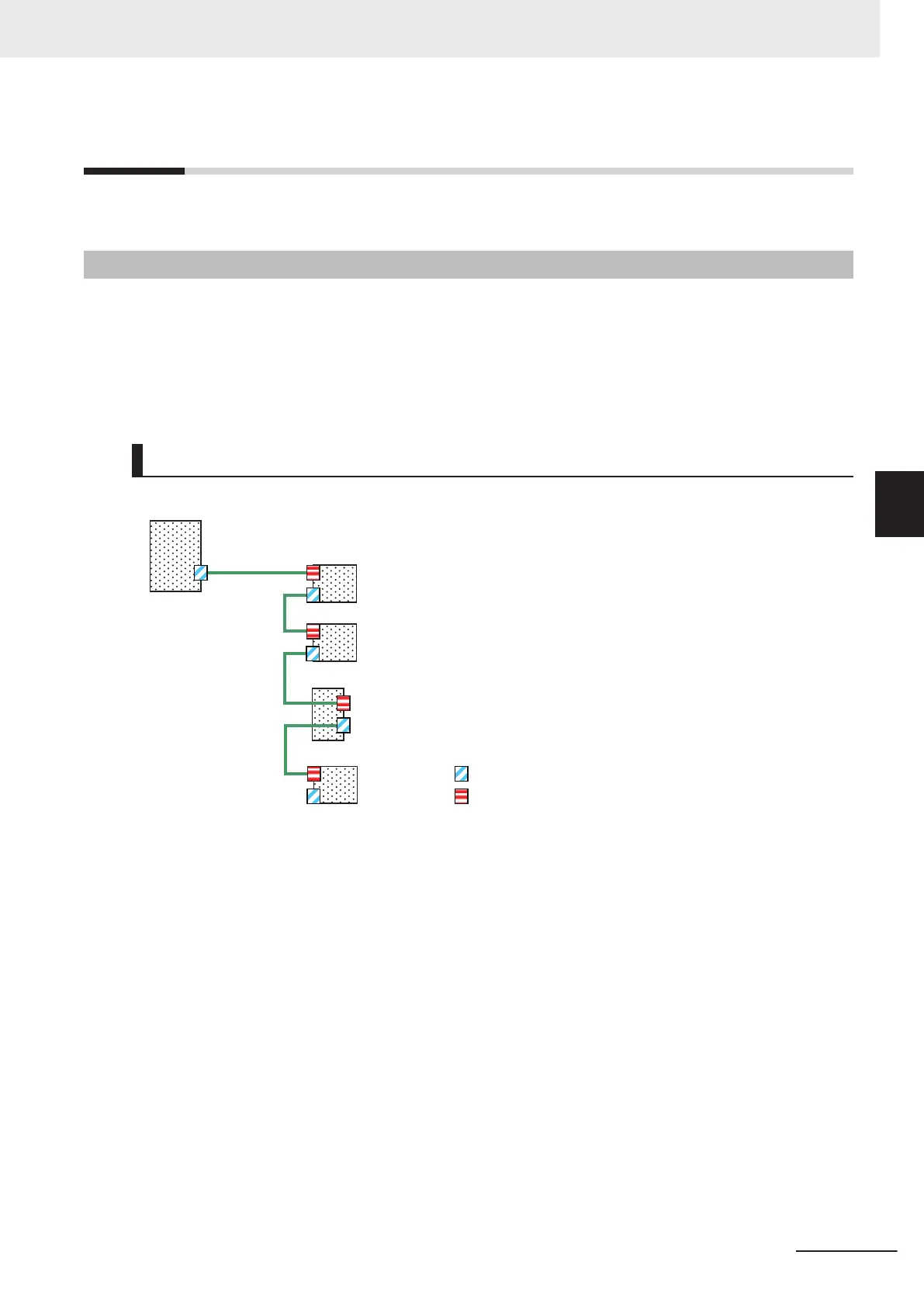
No Branching
EtherCAT Master
Remote I/O Slave
Remote I/O Slave
Servo Drive Slave
Remote I/O Slave
: Output port
: Input port
4 Mounting and Wiring
4-11
CK3E-series Programmable Multi-Axis Controller User’s Manual Hardware (I610)
4-5 Laying the EtherCAT Network
4
4-5-1 Supported Network Topologies

 Loading...
Loading...








