Regular Payload Series-Hardware Installation Manual TM5 Series Hardware Version: 3.2 34
Model TM5-700 & TM5-900 Series
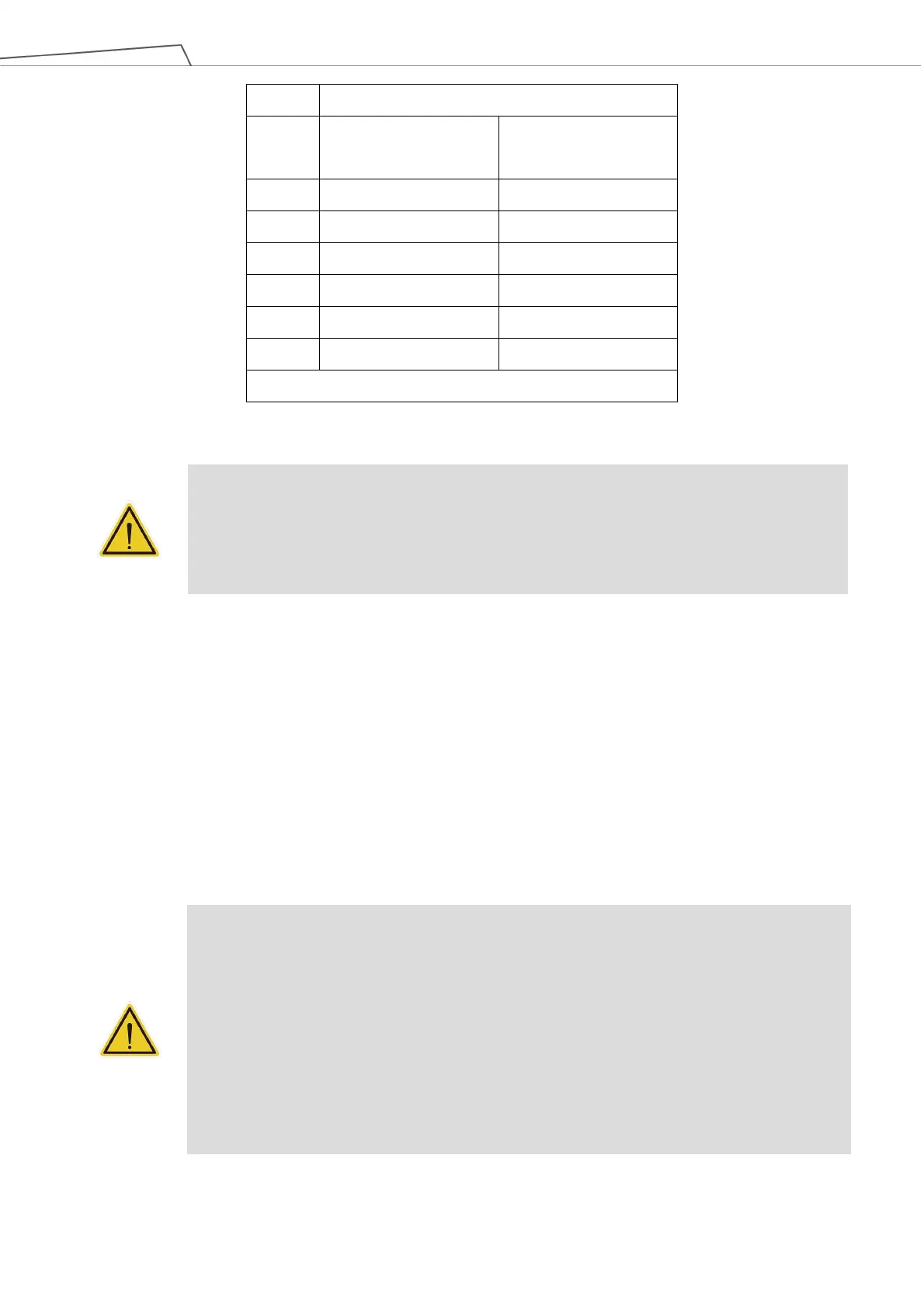
Item Rated torque Limit for repeated peak
torque
J1 118 157
J2 118 157
J3 118 157
J4 23 43
J5 23 43
J6 23 43
Unit: Nm
Table 4: Rated Torque and Limit for Repeated Peak Torque of Regular Payload Robot Series
WARNING:
Use the total weight of the end-effector and the payload to stay within the payload rating of the
robot. Ensure that the system never exceeds that maximum payload.
You should perform a full risk assessment that includes the end-effector and payload samples,
to ensure the safety of the entire system.
4.2.1.6 Robot Arm Installation
The robot can be secured to another surface with the use of (4) M10 screws and washers. The mounting
pattern is shown below. The recommended tightening torque is 40 Nm.
Optional - Two openings for 6 mm position pins are provided for more secure position mounting.
Ensure the strength of the mounting surface and its surround area before installations for upside down
mounting and side mounting such as on the ceiling or the wall. Wherever the installation takes place, the
robot setting remains equivalent.
DANGER:
1.
The TM Robot must be securely and tightly screwed down before use. The strength of the
mounting surface must be sufficient.
When operating at high speed, the robot can generate up to 350
N reaction force to the
mounting surface and screws. In order to avoid decreased performance caused by robot
slip or vibration, the recommended mounting surface should be a steel plate at least 20
mm thick, its flatness should be 0.1
mm or less, its surface roughness should be Rz25 or
less. The recommended screw should be M10 x L30 mm, at least 8.8 strength.
2.
Do not immerse TM Robot in water. Installation in water or a humid environment will
permanently damage the robot.
 Loading...
Loading...







