Regular Payload Series-Hardware Installation Manual TM5 Series Hardware Version: 3.2 74
6.4.3 Removal of the Robot Arm and Tightening
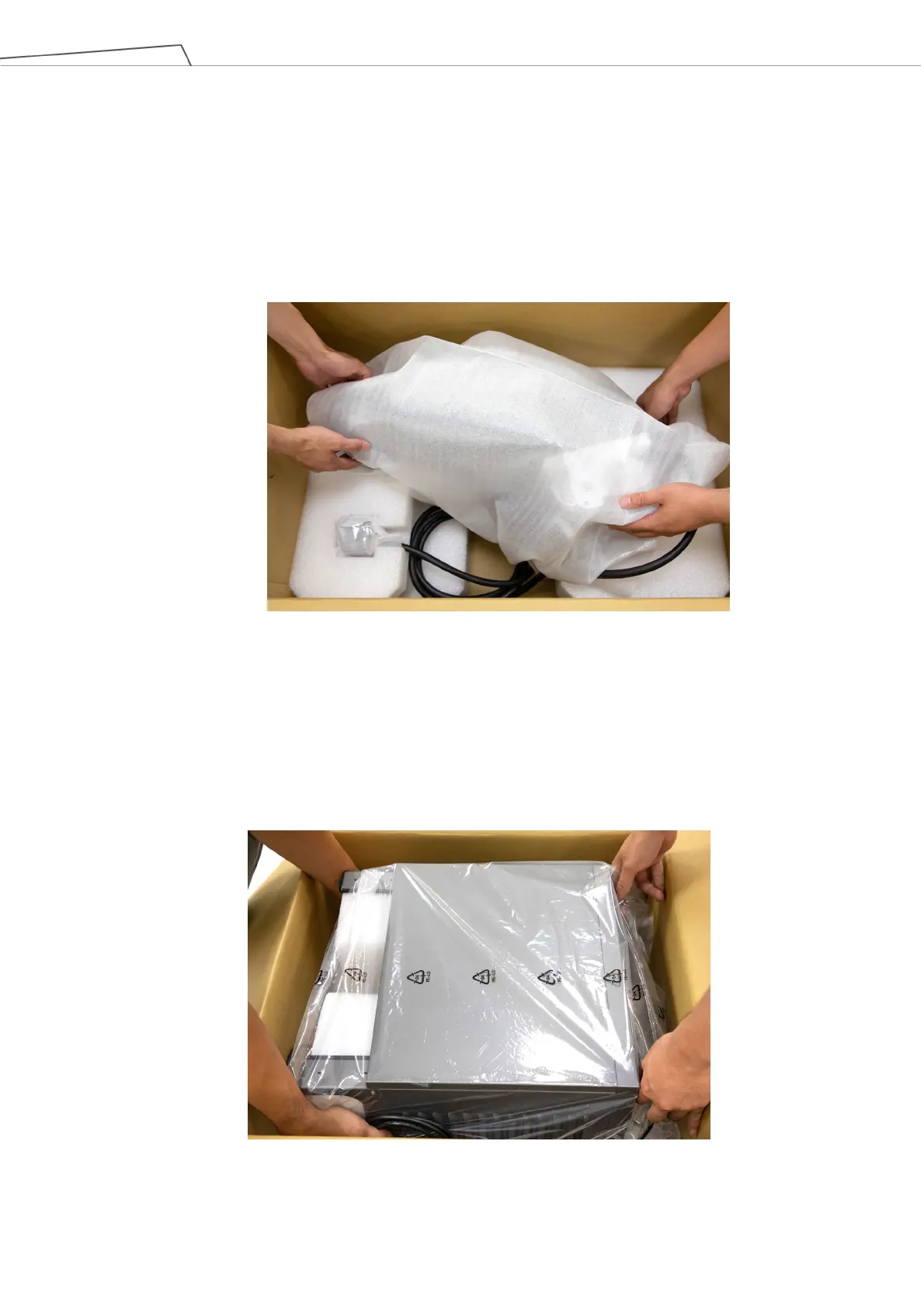
At least two people should remove the robot arm from the carton. For the correct holding positions, refer to
the figure below. Place the robot on the mounting base. If it is designed with connection pins, align the
pinholes of the robot base module. Tighten two locking screws with metal washers for the robot base that
are diagonally across from each other, and then tighten the other two locking screws.
Follow the tightening torque recommended in 4.2.1.6 Robot Arm Installation
Figure 70: Moving the Robot Arm (1/2)
The Robot Arm itself should be handled with at least two people. One person should carry the Lower arm
and Upper arm, and the other should hold on to the position between the base and 1
st
Joint as well as the
6
th
Joint. Before the Robot Base is fastened with screws tightly, the Robot Arm should always be
supported to avoid tipping.
Figure 71: Moving the Robot Arm (2/2)
 Loading...
Loading...







