Rockwell Automation Publication 750-PM101B-EN-P - April 2022 105
Chapter 4 Troubleshooting
Testpoint Codes and
Functions
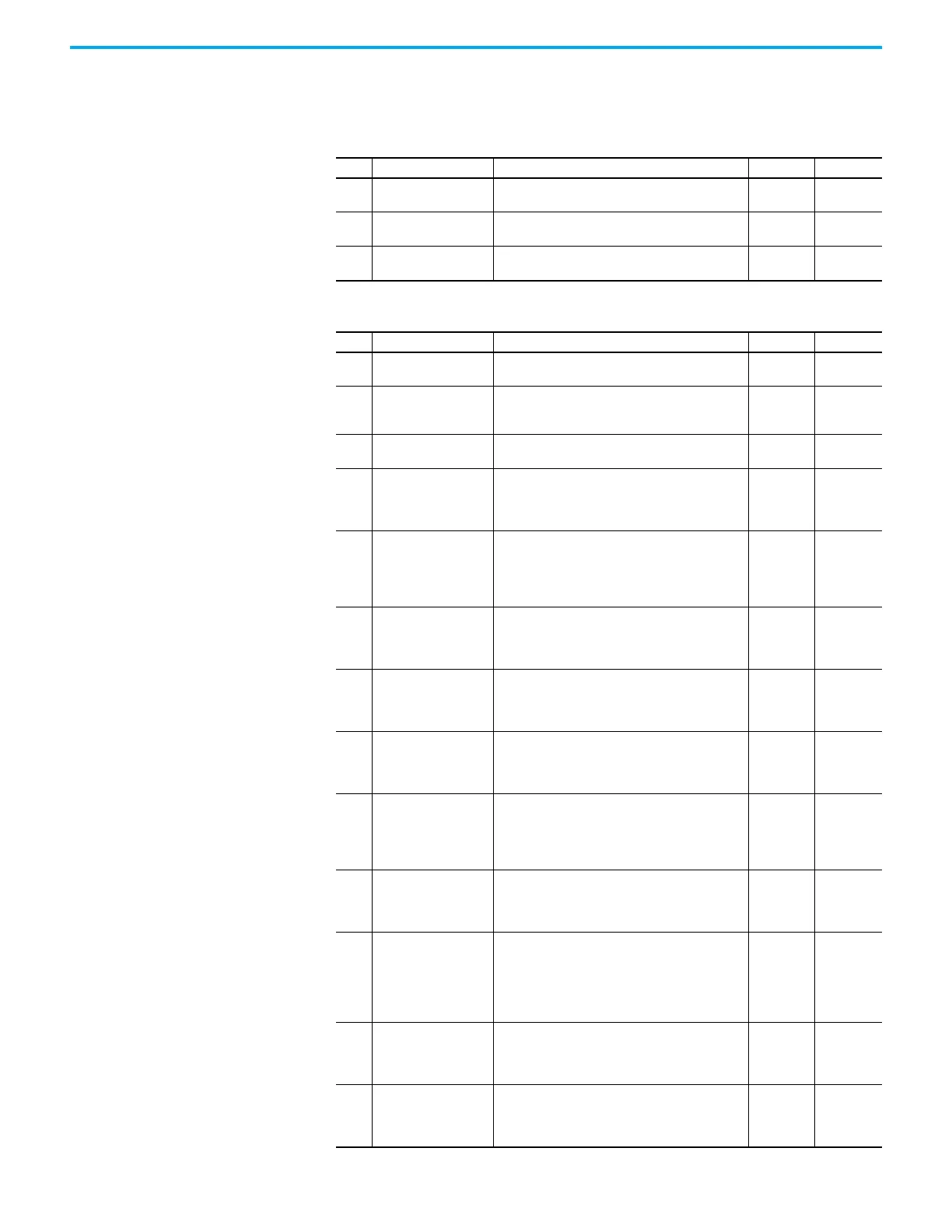
Select testpoint with a [Testpoint Sel n] parameter. View testpoint values with
[Testpoint REAL n] and [Testpoint DINT n] parameters.
Port 9 Testpoint Codes
No. Name Description Data Type Units
1 TrqPrvState
The present state of the Torque Proving state
machine.
DINT t/f
2 TrqPrvSpdBandTimer
Timer count for the Speed Band function in Torque
Proving.
REAL Sec
3 TrqPrvBrkSlipStartActv
Indicated the Brake Slip start has occurred and is
presently active.
DINT t/f
Port 10 Testpoint Codes
No. Name Description Data Type Units
1 VRef Ramp In
Velocity Reference at the input to the ramp and S
Curve function.
REAL PU
2 VelRamp Rate
This signal is the active rate of change of the
velocity reference. It is produced by the velocity
reference ramp and S curve function.
REAL PU/S
3 Vel Droop
Velocity Droop offset signal output from droop
function.
REAL PU
10 PRef Sel Del
The change in 10:1684 [PRef Selected] every
millisecond. It is applied to the input of the
Electronic Gear Ratio (EGR) function. Position units
are encoder edge counts.
DINT Cnts
11 PRef Sel EGR
The output of the Position Reference Electronic Gear
Ratio function. It is similar to the EGR input in that it
is a position change over 1 millisecond. This signal is
re-accumulated to create 10:1686 [Pref EGR Out].
Position units are encoder edge counts.
DINT C/ms
12 PRef Ofst In
The summation of 10:1691 [Psn Offset 1] and
10:1694 [Psn Offset 2]. It is the user input to the
Position Reference Offset function. Position units
are encoder edge counts.
DINT Cnts
13 PRef OfstPsn
The output of the Position Reference Offset
function. It represents the total offset that is to be
applied to the Position Reference. Position units are
encoder edge counts.
DINT Cnts
14 PRef OfstOut
The change in Position Reference Offset that is to be
applied to every millisecond. It is summed with the
output of the position reference EGR. Position units
are encoder edge counts.
DINT Cnts
15 PRef NF Out
The output of the Position Reference Notch Filters. It
represents a Position Command change over 1
millisecond. This signal is re-accumulated to create
10:1731 [Position Command]. Position units are
encoder edge counts.
DINT Cnts
20 LdPsn Fb Del
The change in the Load Position Feedback every
millisecond. It is the input to the Load Position
Feedback Gear Ratio. Position units are encoder
edge counts.
DINT C/ms
21 Psn Fb Del
The change in 10:1746 [Position Fb] every
millisecond. It is subtracted from the output of the
Position Reference Notch Filters. The result of this
subtraction when re-accumulated becomes
10:1750 [Position Error]. Position units are encoder
edge counts.
DINT C/ms
22 PReg LdError
The difference between the output of the Position
Reference Notch Filters and the Load Position
Feedback Gear Ratio function. Position units are
encoder edge counts.
DINT Cnts
23 LdPsn Geared
The output of the Load Position Feedback Gear Ratio
function. When re-accumulated this becomes
10:1748 [Psn Load Actual]. Position units are
encoder edge counts.
DINT Cnts

 Loading...
Loading...







