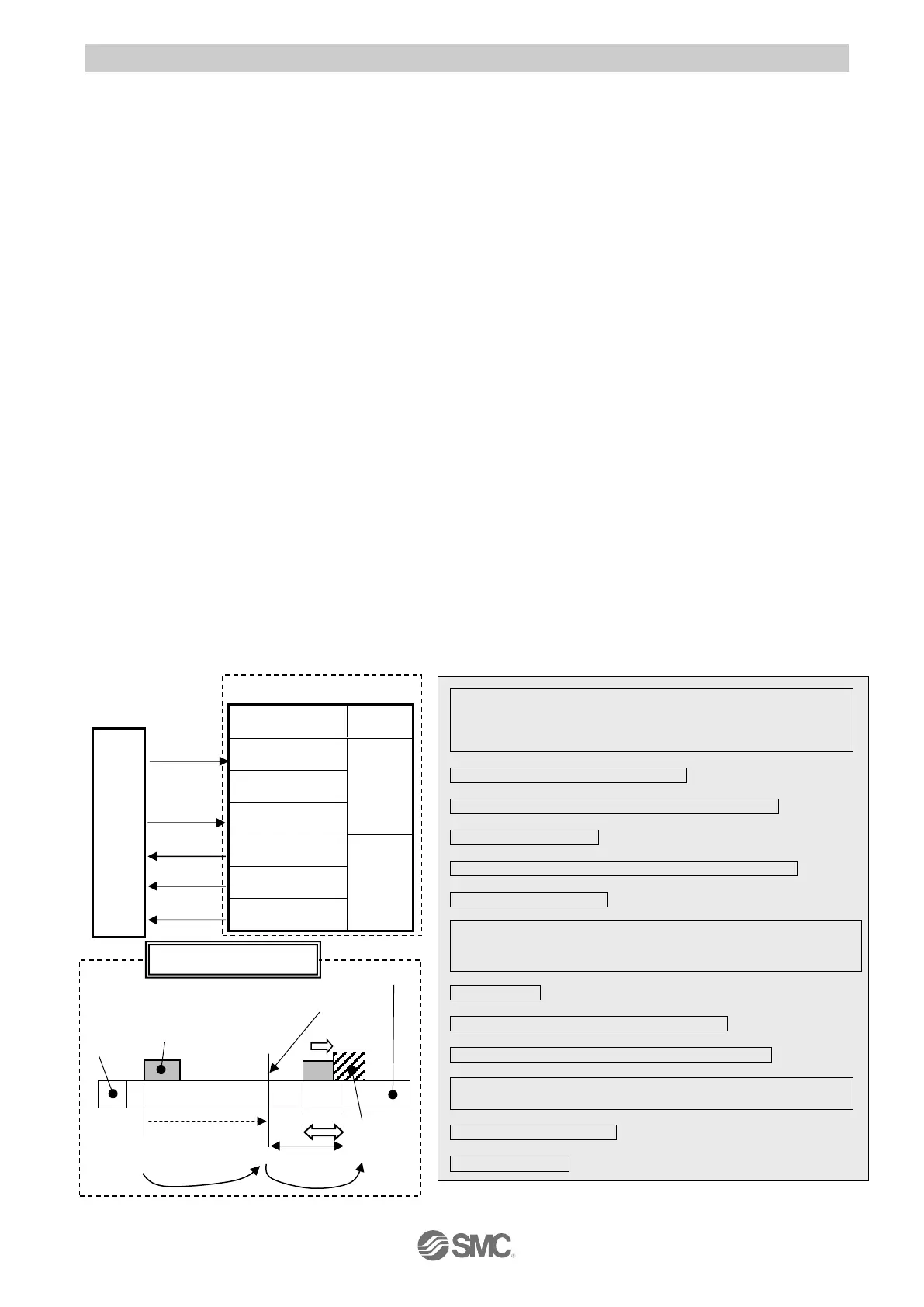
(1) Positioning operation starts until the start position for the
pushing operation.Input pulse amount 8000[pulse], pulse
frequency 8000[pulse/sec], acceleration 0.1[s], deceleration
0.1[s] to "PP-"
↓
Travels to the start position of pushing
↓
(2) When the travel is completed, "INP" output is ON.
↓
(3) BUSY output is OFF
↓
Complete the movement to the start position of pushing.
↓
(4) TL input is turned ON.
↓
(5) Starts pushing
Input pulse amount 2400[pulse], pulse frequency 2400[pulse/sec],
acceleration 0.01[s], deceleration 0.01[s] to "PP-"
↓
Starts pushing
↓
(6) TLOUT is turned ON when pushing starts
↓
Push the workpiece with the specified pushing force
↓
(7) INP turns ON when pushing force stays larger than Trigger
LV for specific period of time or longer.
↓
(8) “BUSY” output turns off
↓
Pushing completes
9.2 Pushing operation
Calculation example of the travel amount (pulse) and travel speed (pulse frequency) when the electronic
gear ratio is 1/1 (Recommended value) which are set with basic parameter "Undefined No. 11" "Undefined
No.12".
Example
) Perform pushing from the home position to the start position for pushing 100mm away at
100mm/sec.
From the point of 100mm, pushing starts at 30mm/s for 30mm with 50% of pushing force.
Setting example of pulse signal
Actuator lead: 10[mm/rotation], electronic gear (denominator): 1, electronic gear (numerator): 1
2 pulse mode (Pulse input for each direction)
Positioning operation: Travel amount 100mm Travel speed 100mm/s
Acceleration 3000mm/s
2
Deceleration 3000mm/s
2
Pushing operation: Travel amount 30mm Travel speed 30mm/s
Acceleration 3000mm/s
2
Deceleration 3000mm/s
2
Calculation example
Travel amount (Pulse amount [Pulse])
= Encoder resolution [Pulse/Rotation] x Electronic gear[1/1] / Actuator lead [mm/rotation] x Travel distance
[mm]
Travel amount (Pulse frequency [Pulse/sec])
= Encoder resolution [Pulse/Rotation] x Electronic gear[1/1] / Actuator lead [mm/rotation] x Travel distance
[mm/s]
Acceleration / deceleration time [s]
=Travel speed[mm/s] / Deceleration or acceleration speed [mm/s
2
]
<Calculation example of positioning operation>
Travel amount: 800 x 1 / 10 x 100 = 8000[pulse]
Travel speed: 800 x 1 / 10 x 100 = 8000 [pulse/sec]
Acceleration / deceleration time: 100 / 3000 = 0.1 [s]
<Calculation example of pushing operation>
Travel amount: 800 x 1 / 10 x 30 = 2400[pulse]
Travel speed: 800 x 1 / 10 x 30 = 2400 [pulse/sec]
Acceleration / deceleration time: 30 / 3000 = 0.01 [s]
Load
Motor
0mm 100mm 130mm
Home position
Pushing range
 Loading...
Loading...