Single wire interface module (SWIM) UM0470
16/39 DocID14024 Rev 4
3.7 CPU register access
The CPU registers are mapped in the STM8 memory, and they can be read or written
directly using the ROTF and the WOTF SWIM commands. the write operations to the CPU
registers are committed only when the CPU is stalled.
To flush the instruction decode phase, the user must set the FLUSH bit in the DM
control/status register 2 (named DM_CSR2) after writing a new value in the program
counter (PCE, PCH, PCL) Refer to
Section 4.12.10 on page 33) for more details.
3.8 SWIM communication in Halt mode
To maintain the communication link with the debug host, the HSI oscillator remains ON
when the MCU enters the Halt mode. This means that Halt mode power-consumption
measurements have no meaning when the SWIM is active.
In Halt mode, the user can access the SWIM module but not the DEBUG module. The
NO_ACCESS bit in the SWIM_CSR register is set when the system is in HALT, WFI or
readout protection mode. It means that in this case, no connection is accessible between
the SWIM module and the DEBUG module nor between the rest of the STM8 systems.
The OSCOFF bit in the SWIM_CSR register is used to switch off the HSI oscillator. In this
case, any access to the SWIM module is lost as long as the device is in Halt mode and that
the SWIM pin is high. The only way to recover the debug control is to induce a falling edge
on the SWIM pin: this will re-enable the HSI oscillator.
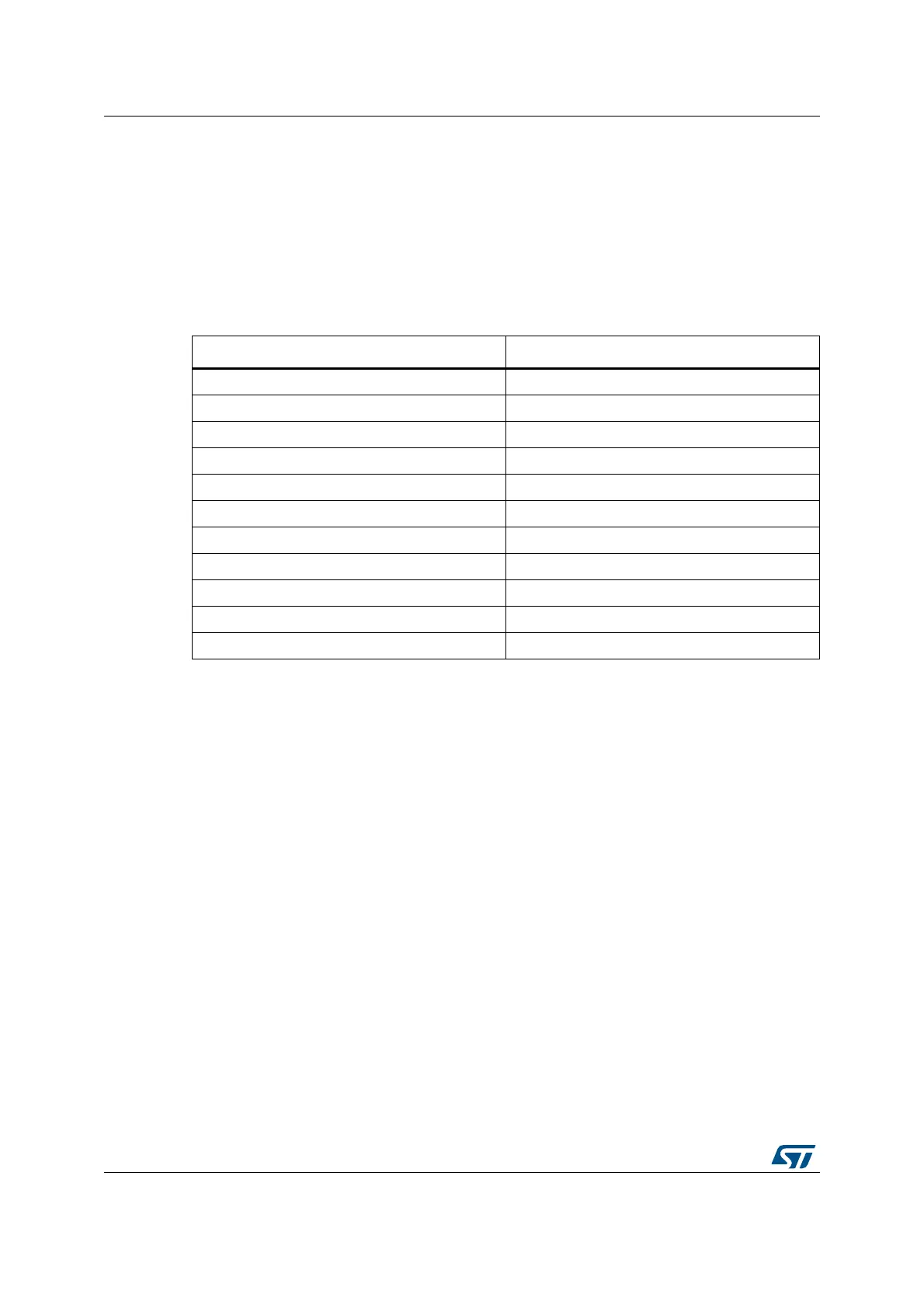
Table 2. CPU register memory mapping in STM8 MCUs
CPU register Memory location
A 7F00h
PCE 7F01h
PCH 7F02h
PCL 7F03h
XH 7F04h
XL 7F05h
YH 7F06h
YL 7F07h
SPH 7F08h
SPL 7F09h
CC 7F0Ah