U0-24 output signal 2 distribution
Note: When reading the state through communication, the binary numbers correspond to /ALM
position in turn from right to left. 0 means that the position signal has no input, and 1 means that
the position signal has input.
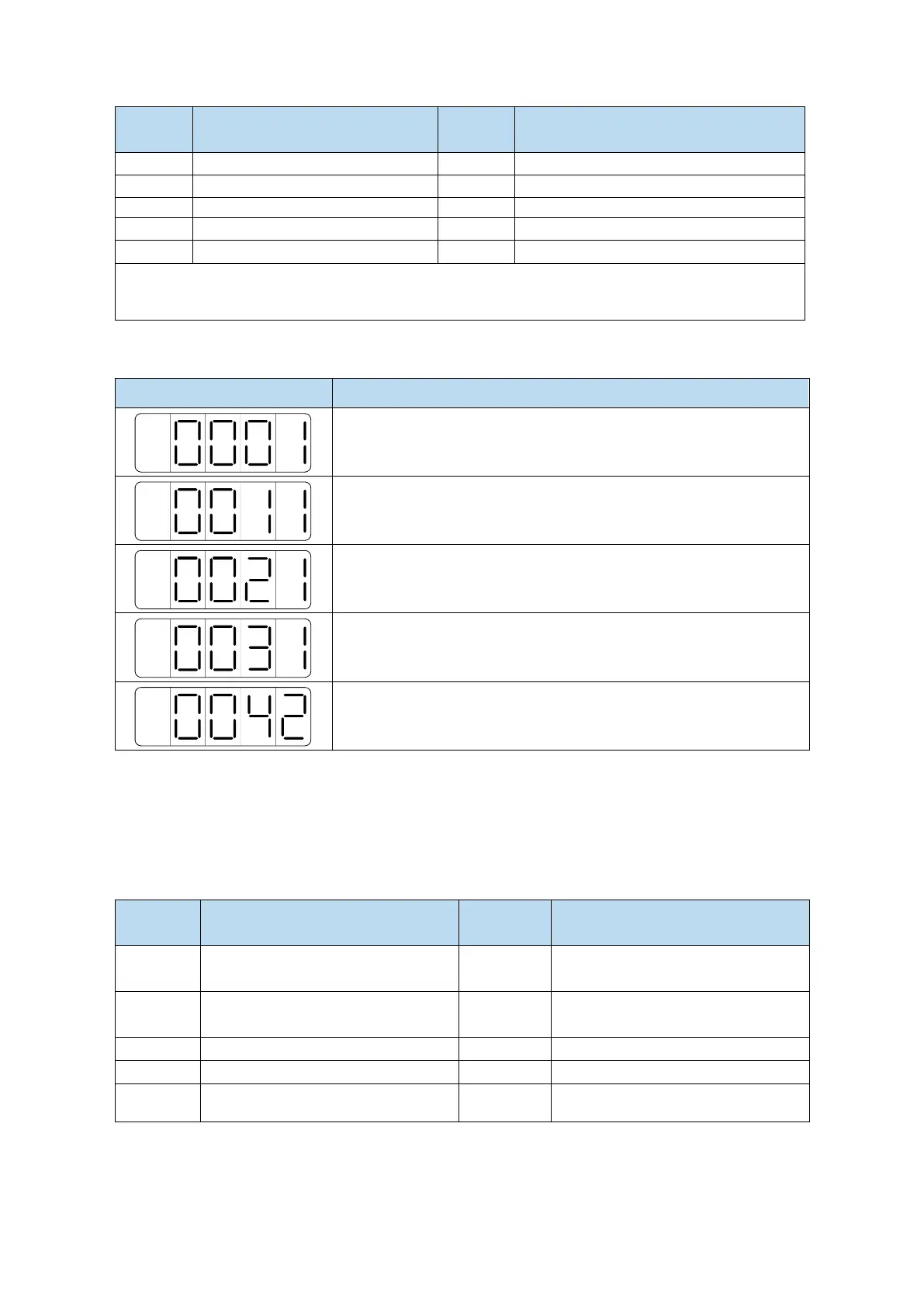
U0-88 motor code read status
0001——Read encoder motor parameters successfully, but P0-33=0,
use the motor parameters in the read encoder.
0011——Read the encoder motor parameters successfully, P0-33≠0,
use the motor parameters in the driver.
0021——Read the encoder motor parameters successfully, but the
parameter value is 0, please set P0-53.
0031——Read encoder motor parameters successfully, but damaged
(CRC check error), please set P0-53.
0042——Failed to read encoder motor parameters, please set P0-53.
4.4 Group F auxiliary function parameters
4.4.1 Group F0
Panel external instruction
auto-tuning
Resume to default settings
Panel internal instruction
auto-tuning
Clear the position offset
Panel vibration suppression 1
Clear up historical alarm records
Panel vibration suppression 2
Panel inertia identification
Panel vibration suppression (fast
FFT)
1. Alarm clear(F0-00)
Setting F0-00=1 can reset the alarm status. When an alarm occurs, please first eliminate the cause of
the alarm, and then clear up the alarm.

 Loading...
Loading...
