2. Recommended brake resistance specifications
min resistance (cannot be
less than this value)
External regeneration
resistance
External regeneration
resistance
(recommended power
value)
Note:
(1) The smaller the resistance is, the faster the discharge will be, but it is easy to break down the
resistance if it is too small. Therefore, the lower limit should be as close as possible but not less than
the lower limit when selecting the type.
(2) When wiring, please use high temperature resistant and flame-retardant wires, and pay attention that
the regenerative resistance surface does not contact with the wires.
5.3 Position control
5.3.1 General position control
5.3.1.1 Electronic gear ratio
1. Overview
The so-called "electronic gear" function has two main applications:
(1) Determine the number of command pulses needed to rotate the motor for one revolution to
ensure that the motor speed can reach the required speed.
As an example of 17-bit encoder motor, the pulse frequency sent by the upper computer PLC is
200kHz:
Pulses per revolution set to 10000
Electronic gear ratio set to 131072:10000
Set pulses per revolution to 5000
Electronic gear ratio set to 131072:5000
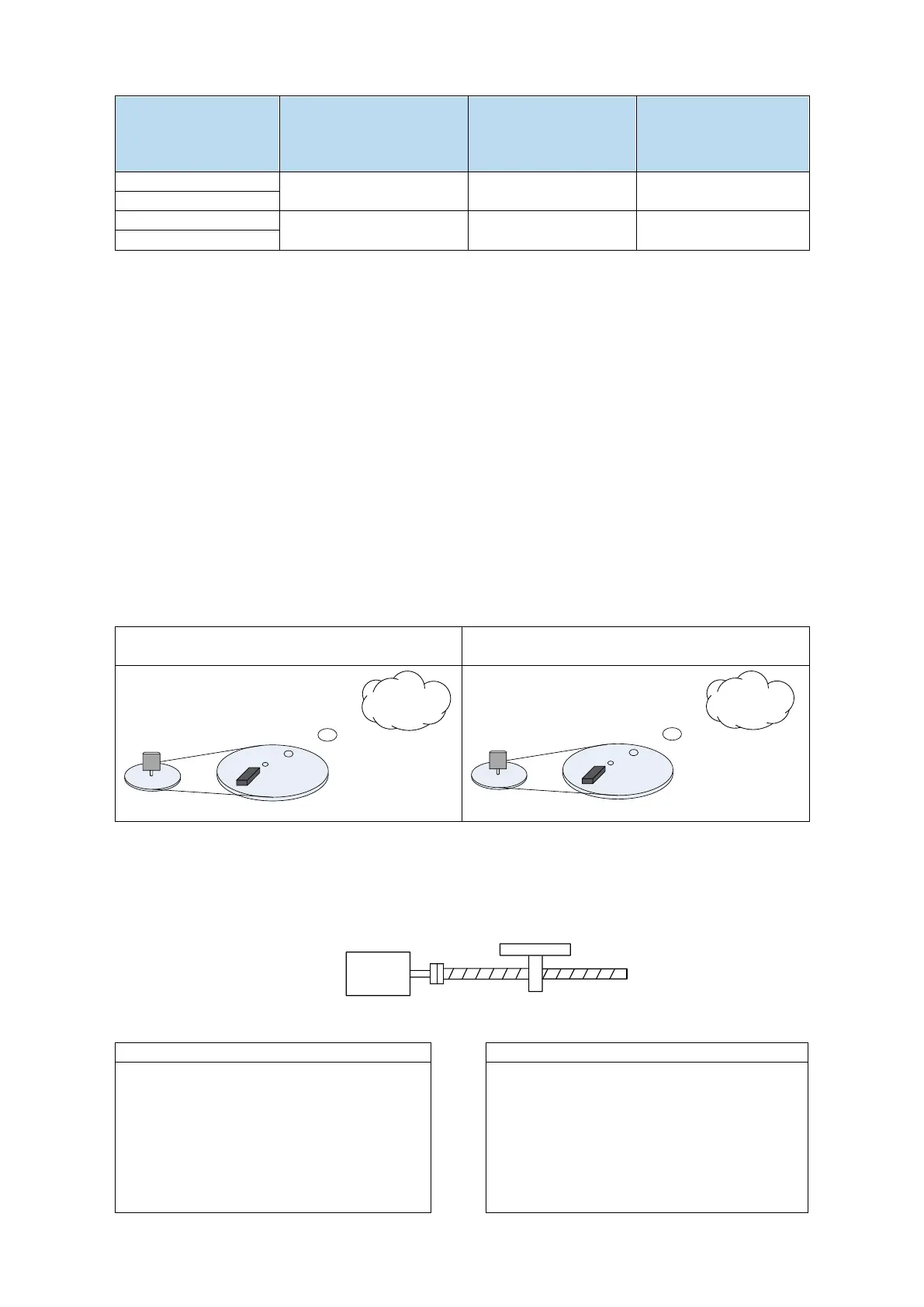
Max speed
600rpm
Two circle radius ratio: 2:1
Big circle run one rotation (need 20000
pulses), small circle run two rotations.
Max speed
1200rpm
Two circle radius ratio: 2:1
Big circle run one rotation (need 10000
pulses), small circle run two rotations.
(2) In the precise positioning, the physical unit length corresponding to 1 command pulse is set for
calculation.
For example: the object moves 1um per command pulse. The command pulses of load rotating one
circle = 6mm / 1um = 6000. In the case of deceleration ratio is 1:1, set pulse per rotation P0-11=6000,
P0-12=0. Then if the PLC outputs 6000 pulses, the object will move 6mm.
Encoder: 131072(17-bit) ball screw pitch: 6mm
Do not change the electronic gear ratio
Change the electronic gear ratio
Without changing the ratio of the electronic
gear to the motor, the rotating cycle is
131072 pulses (P 0-11=0, P 0-12=0). If the
workpiece is moved 6 mm in one turn, the
number of pulses needed is 131072. If the
workpiece is moved 10 mm, it will need
10/6*131072=218453.333 pulses. When the
decimal number is omitted, the error will
By changing the electronic gear ratio, the
motor needs 6000 pulses to rotate one circle.
If the workpiece moves 6 mm in one turn, the
number of pulses needed is 6 000. If the
workpiece is moved 10 mm, it needs
10/6*6000 = 10000 pulses. When the pulse is
sent, the decimal number will not be produced
and the error will not be produced.

 Loading...
Loading...
