DEC
INC
Long press
ENTER
Short press
ENTER
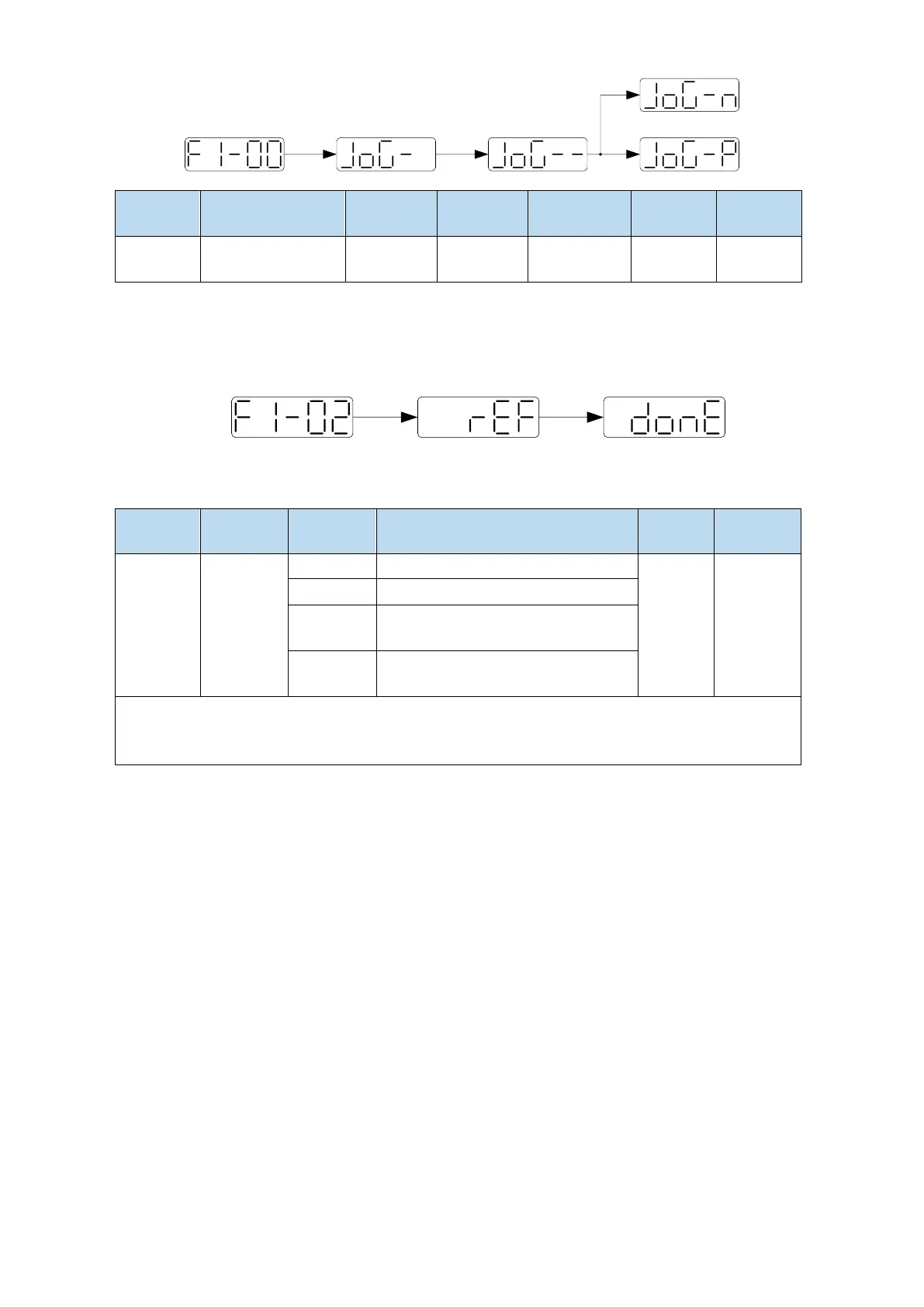
3. Current sampling zero-correction (F1-02)
When the servo driver is self-renewed or the motor runs unsteadily after a long time, the user is advised
to use the current sampling zero-correction function.
Long press ENTER Short press ENTER
Press STATUS/ESC to exit.
4. Forced enable (F1-05)
Fieldbus enable (the model which
supports motion bus)
F1-05 = 0: cancel enable, enter bb status.
F1-05 = 1: forced enable, servo is in RUN status.
Note:
(1) After power on again, the forced enable set by F1-05 will fail.
(2) If it needs to enable when power on and still enable after re-power on, P0-03 should be set to 1
and P5-20 to n.0010.
5. Reset turns of absolute encoder (F1-06)
Refer to chapter 5.7.5.
4.5 Fault alarm handling
When a fault occurs, the alarm status is automatically jumped out, and the alarm number is
displayed. When there is no fault, the alarm status is invisible. In the alarm state, the fault can be reset
by writing 1 to F0-00 through panel operation.
If the servo power supply OFF makes the servo alarm, it is not necessary to clear the alarm.
Note: When an alarm occurs, the cause of the alarm should be eliminated first, and then the alarm
should be removed.

 Loading...
Loading...
