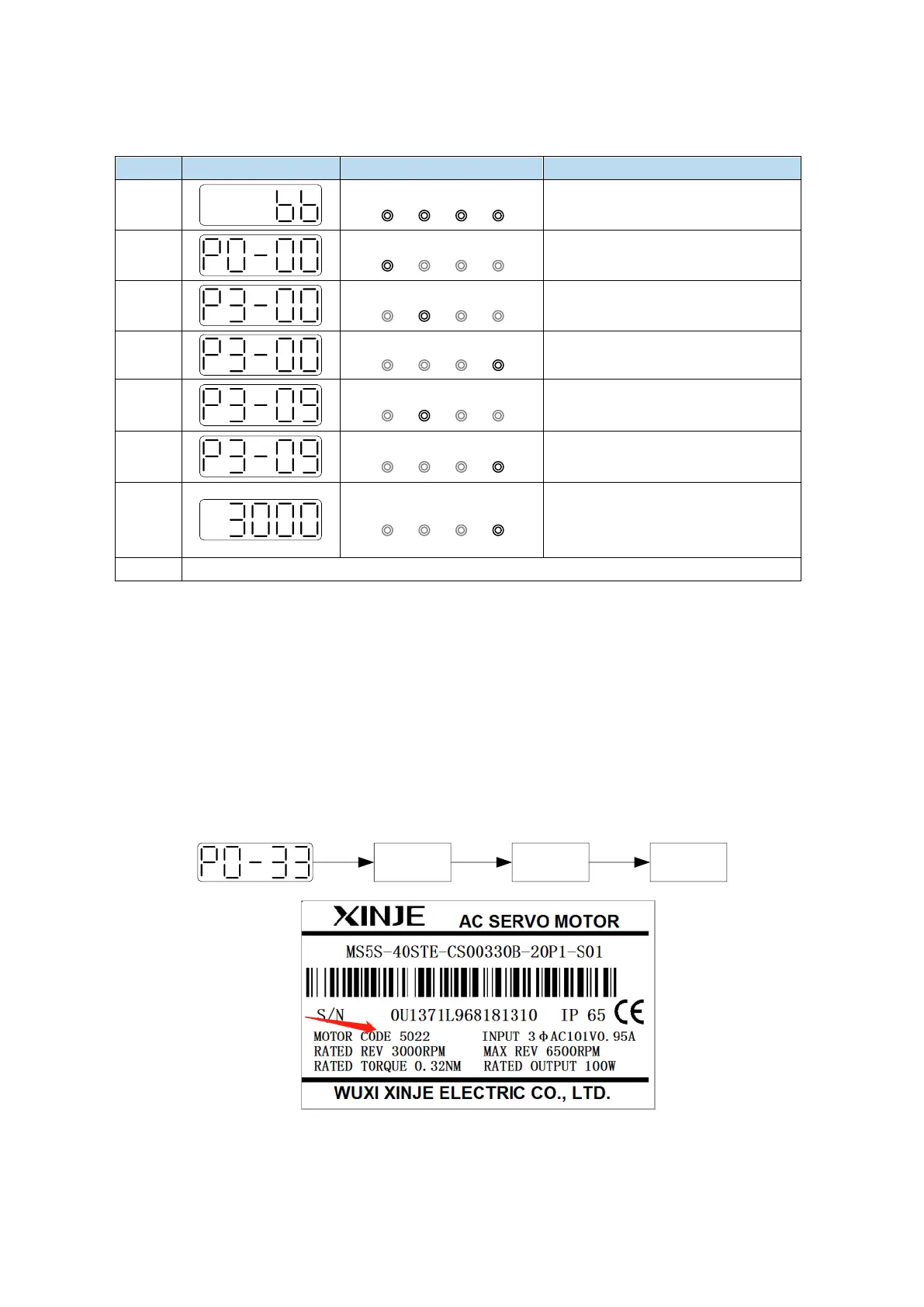
4.6 Parameter setting example
An example is given to illustrate the operation steps when the content of parameter P3-09 is changed
from 2000 to 3000.
Press INC for three times to show
P3-00
Press ENTER, the last 0 will flash
Long press ENTER to show the
value of P3-09
Press INC, DEC, ENTER to
increase decrease or shift, after
changing, long press ENTER to
confirm
Note: When the setting parameter exceeds the range that can be set, the driver will not accept the
setting value, and the driver will report E-021 (parameter setting exceeds the limit). The parameter
setting overrange usually occurs when the upper computer writes parameters to the driver through
communication.
4.7 Change motor code
A servo driver can be equipped with a variety of motors with similar power levels. Different types of
motors are distinguished by the motor code on the motor nameplate. Before debugging the servo
system, make sure that the motor code U3-00 matches the motor nameplate label.
Input motor
code
Long press ENTER
Complete the
setting
confirm
Short press ENTER
Re-power on

 Loading...
Loading...