Related parameters
Pulse numbers per rotation *1
Pulse numbers per rotation *10000
Electronic gear ratio (numerator)
Electronic gear ratio (denominator)
Group 2 Electronic gear ratio
(numerator) low bit*1
Group 2 Electronic gear ratio
(numerator) high bit*10000
Group 2 Electronic gear ratio
(denominator) low bit*1
Group 2 Electronic gear ratio
(denominator) high bit*10000
Note:
(1) P0-11~P0-14 is all about the parameters of electronic gear ratio, P0-11, P0-12 is group 1, P0-13,
P0-14 is group 2, but the priority of P0-11 and P0-12 is higher than that of P0-13 and P0-14. Only
when P0-11 and P0-12 are set to 0, the ratio of electronic gear P0-13 and P0-14 will take effect.
(2) When P0-11, P0-12, P0-13 and P0-14 are all set to 0, P0-92, P0-93, P0-94 and P0-95 will take
effect.
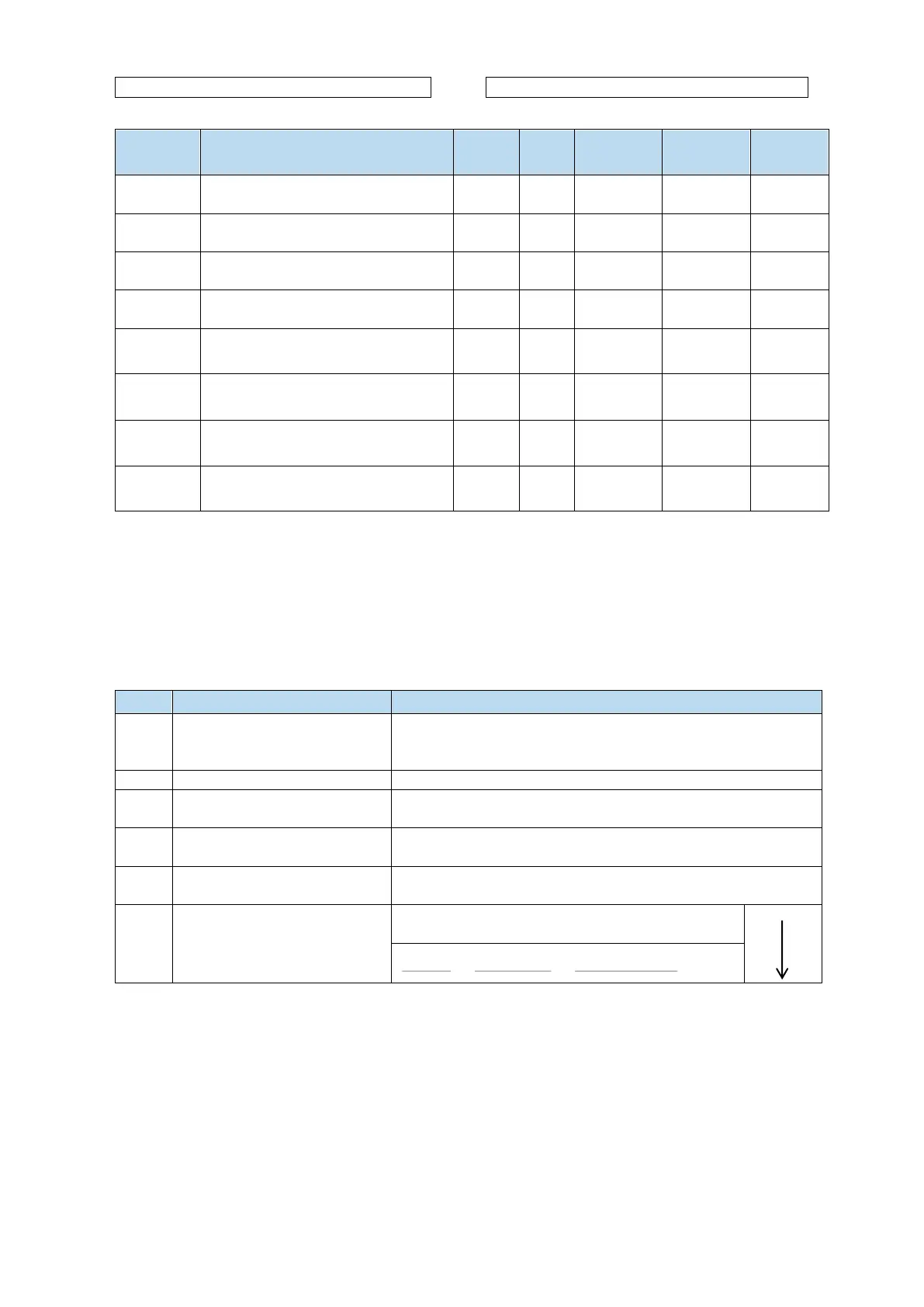
2. Calculation of Pulse Number per Rotation and Electronic Gear Ratio
Confirm the machine
specification
Confirm the deceleration ratio n:m(servo motor turns m
rotations while load turns n rotations), ball screw distance,
pulley diameter.
Confirm the encoder pulse
Confirm the servo motor encoder accuracy
Determine the actual distance or angle corresponding to 1
pulse of the controller
Calculate the command pulses
the load shaft rotates 1 circle
Based on the determined command unit, calculate the
command quantity n of the load shaft rotating for 1 revolution.
Calculate the pulses per
rotation M
Command pulse number of motor shaft rotating for 1 turn
M=N/(m/n).
Set the pulses per rotation
(P0-11/P0-12) or
Electronic gear ratio
(P0-13/P0-14)/(P0-92~95)
nN
m
M140P
130P
resolution
encoder
resolution
encoder
Note:
(1) In step 6, the effective priority of the number of pulses per revolution is higher than the
electronic gear ratio, that is, when P0-11 ~ P0-12 are all 0, P0-13 ~ P0-14 will take effect. In special
cases, if the number of pulses per revolution is calculated as a decimal, the electronic gear ratio should
be considered.
(2) When P0-13 and P0-14 exceed the setting range, please divide the electronic gear ratio into
numerator and denominator. If the ratio still exceeds the parameter setting range, please use the second
gear ratio P0-92~P0-95. Only when P0-11~14 = 0, the second gear ratio takes effect.
(3) The resolution of DS5 series servo motor encoder is 131072 (17 bits) and 8388608 (23 bits).
(4) The command unit does not represent the machining accuracy. On the basis of the mechanical
accuracy, refining the instruction unit quantity can improve the positioning accuracy of the servo
system. For example, when using the lead screw, the mechanical accuracy can reach 0.01mm, so the

 Loading...
Loading...
