3. Parameter setting
ZCLAMP input signal is ON, forced speed command is 0, when the speed below
P3-13, switch to position mode and the servo lock in this position.
ZCLAMP input signal is ON, forced set the speed command to 0.
ZCLAMP input signal is ON, the speed below P3-13, switch to position mode and
the servo lock in the position.
Note: after entering zero clamp mode, present setting speed is higher than P3-13,
motor doesn’t run, the ZCLAMP signal must be OFF, then motor will run again.
ZCLAMP signal is ON, the setting speed is less than P3-13, switch to position
control mode, and servo is locked at this position. At this time, if setting speed is
over P3-13, the motor will run again.
5.4.1.3 Speed reach signal (/V-RDY)
Related parameter
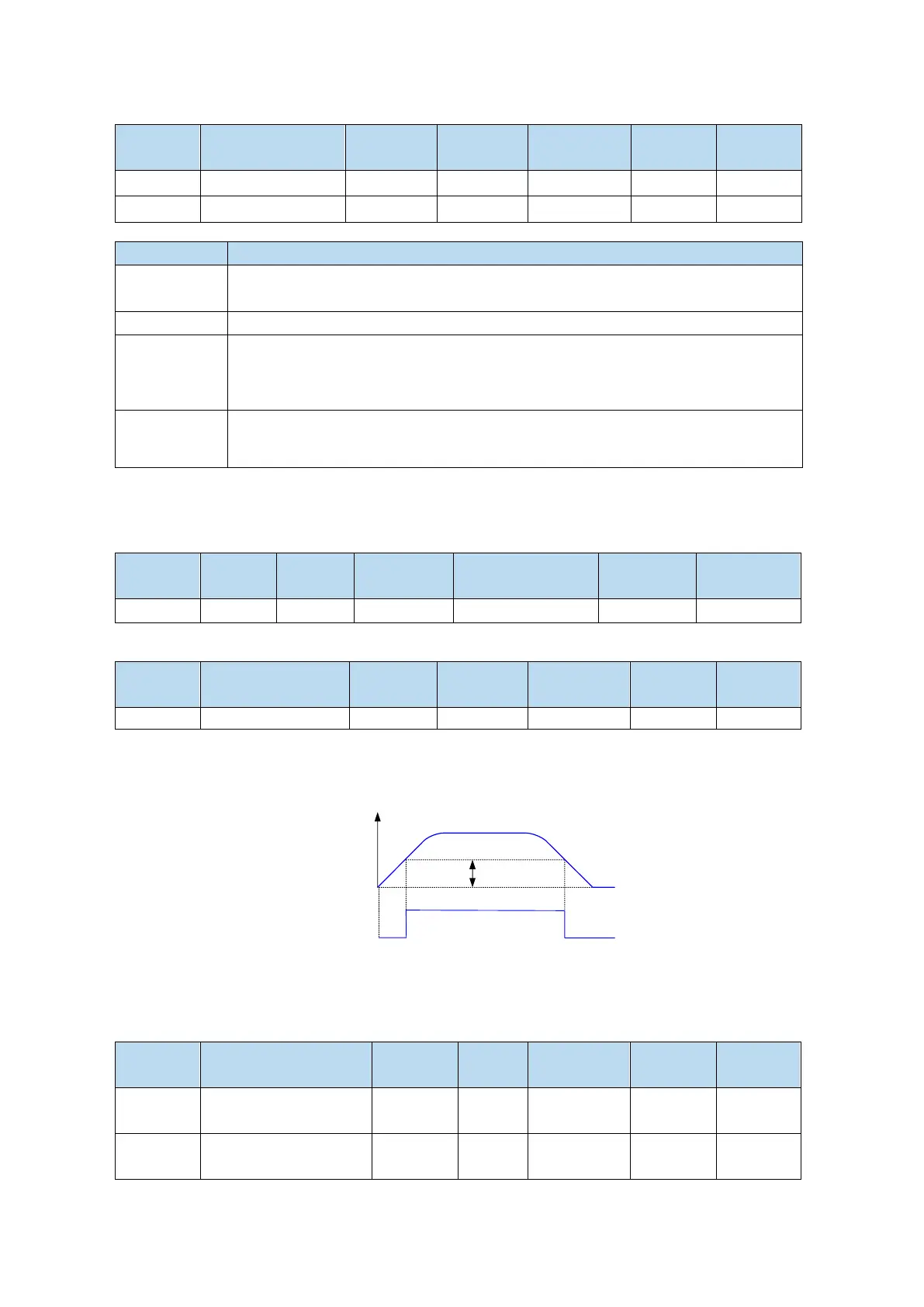
Speed arrival signal output condition
When the actual motor speed is greater than P5-05, output speed reach signal (/V-RDY).
Speed n
(rpm)
P5-05
/V-RDY ON
OFF
OFF
5.4.1.4 Speed command filter
Related parameter
Speed command filter
selection
Speed command filter
time

 Loading...
Loading...
