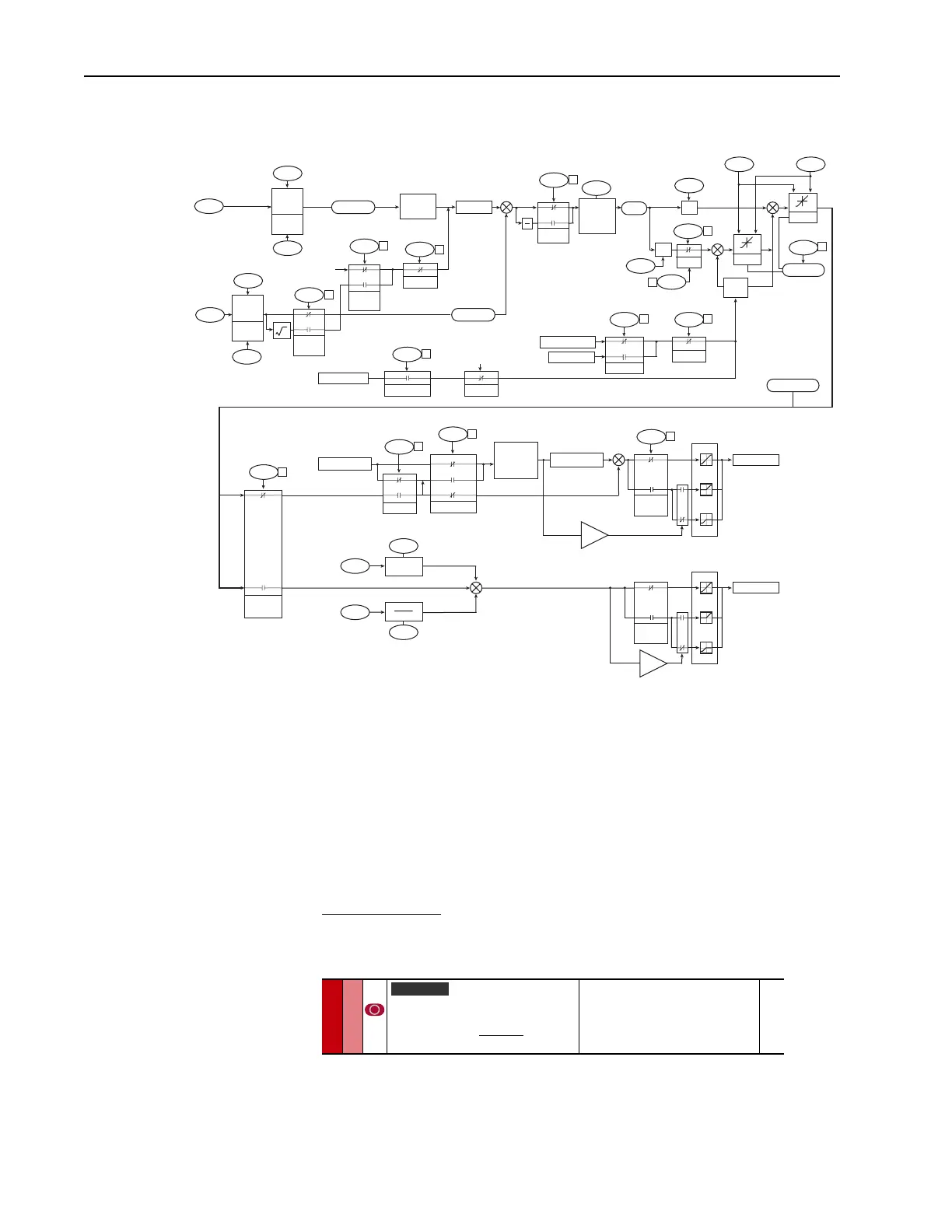
2-150 Process PI Loop
Figure 2.29 Vector Control Option Process PI Loop Overview
PowerFlex 700 Firmware 3.001 (& later) Enhancements
Process PID Control and Trim enhancements have been included in
firmware version 3.001 (and later) for the PowerFlex 700 Vector Control
drive, including:
• Derivative term added to Process PI controller to create PID
• Ability to scale output of PID to a percentage of Speed Reference
• Connect scale blocks to the Reference and Feedback selections on PID
• Ability to select % of Reference for the Speed Trim function
Derivative Term
The Derivative term has been added to the Process PI. This adds to the
flexibility of the Process control.
For example, winders using torque control rely on PD control not PI
control. Also, [PI BW Filter] is useful in filtering out unwanted signal
response in the PID loop. The filter is a Radians/Second low pass filter.
126
PI
Reference
Sel
460
461
462
PI Ref Hi
PI Configuration
PI Configuration
Torque
Ref B Sel
Torque Ref B Mult
Torque Ref A Div
Torque
Ref A Sel
PI Configuration
Linear
Ramp &
S-Curve
Current or
Voltage
PI
Config
PI Status
Enable
Invert
Ramp
Ref
PI Ref Lo
Scale
Hi/Lo
128
135
124
124
134
124
PI Configuration
124
PI Configuration
124
PI Configuration
PI Configuration
PI Configuration
Anti-Windup
PI Integral Time
124
PI Status
PI Status
134
Z
-1
PI Status
PI Lower Limit PI Upper Limit
PI Prop Gain
PI Error
134
124
PI Status
134
124
1
130
132131
Kp
134
139
129
124
PI Ref
PI Fdbk
Linear
Ramp
PI Cmd
136
463
PI Fdbk Lo
PI Fdbk Hi
PI
Feedback
Select
Scale
Hi/Lo
Fdbk
Sqrt
Enable
Preload
Zero
Clamp
Enable
431
Scale
1
Scale
434
430
LimitExclusive
Speed Cmd
Speed Cmd
Speed Cmd
Torque Cmd
Speed Ramp
≥
0
Preload Value
Speed Ref
Exclusive
Torque
Tr im
137
138
PI Output
In Limit
Ki
Limit
Hold
PI BW
Filter
Limit
427
≥
0
3
0
5
0
8
0
0
0
7
1
4
4
2 0
+32K
–32K
+32K
0
0
–32K
Zero
Clamp
+800
–800
+800
0
0
–800
459 [PI Deriv Time]
Refer to formula below:
Default:
Min/Max:
Units:
0.00 Secs
0.00/100.00 Secs
0.01 Secs
Vector v3
d
PI Error
(%)
d
t
(Sec)
PI
Out
= KD (Sec) x

 Loading...
Loading...








