Chapter 3 Wiring ASDA-A2
3-74 Revision February, 2017
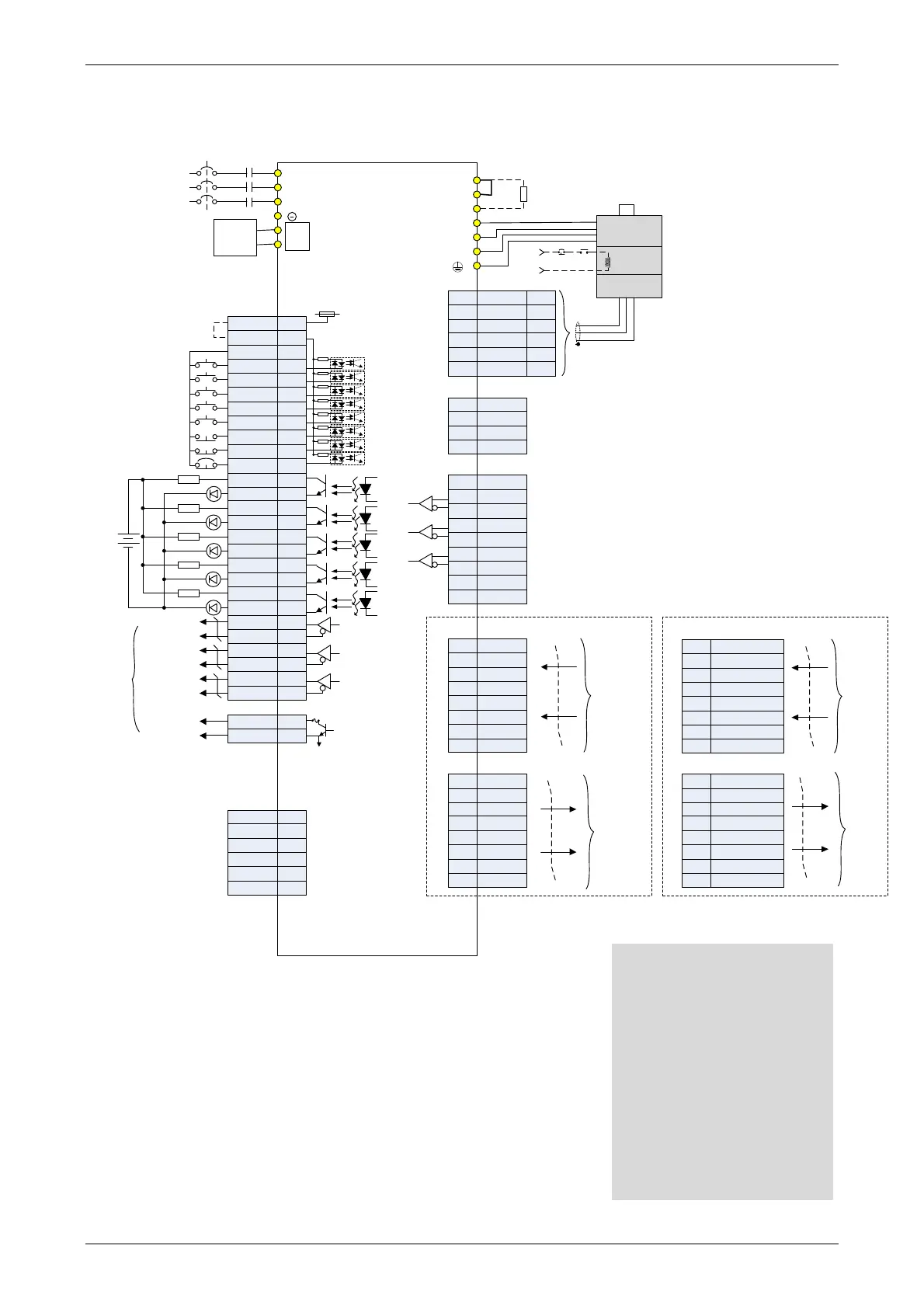
3.13.5 Communication Mode
VDD
COM+
COM-
DI1
DI2
DI3
DI4
DI5
DI6
DI7
DI8
DO1+
DO2-
DO3-
DO4-
DO2+
DO3+
DO4+
DO5+
DO1-
DO5-
45,47,49
17
11
9
10
34
8
33
32
30
7
6
5
4
3
1
2
26
28
31
27
T+
T-
-
+5V
-
GND
4
7
13,15
14,16
9
5
+5V DC
Data-
Data+
GND
4
3
1
2
Opt A
+5V
Opt B
Opt /B
Opt /A
Opt Z
Opt /Z
GND
GND
9
7
5
6
3
1
2
8
4
CN2
CN4
CN1
CN5
Blue
Blue/
Black
P⊕
D
C
U
V
W
4.7KΩ
4.7KΩ
4.7KΩ
4.7KΩ
4.7KΩ
4.7KΩ
4.7KΩ
4.7KΩ
R
S
T
24V
0V
MC
MCCB
AC 380/480 V
3-phase
Servo Drive
ASDA-A2 series
Reserved
ORGP
NL
PL
EMGS
1.5KΩ
1.5KΩ
1.5KΩ
1.5KΩ
1.5KΩ
SRDY
ZSPD
TPOS
HOME
ALRM
24V
DC 24V
Regenerative
resistor
Red
White
Black
Green
SG
Brake
Power supply
Encoder
BRKREMGS
24V
Twisted-pair or
twisted-shield
cable
DC 24V
Power
Supply
Reserved
Reserved
Reserved
*1
*2
*4
*3
Red/Red&
White
Black/
Black&White
-
-
21
22
24
50
25
23
Max. output current 3A
Voltage 50V
CN3
CN6 DMCNET (
for ASDA-A2-F)
9
11
10
12
13
14
15
16
Data output
DMCNET_1A
-
-
-
-
DMCNET_1B
DMCNET_2A
DMCNET_2B
1
3
2
4
5
6
7
8
Data input
DMCNET_1A
-
-
-
-
DMCNET_1B
DMCNET_2A
DMCNET_2B
9
11
10
12
13
14
15
16
CAN H
CAN L
CAN GND
-
-
-
CAN GND
-
CN6 CANopen (
for ASDA-A2-M)
1
3
2
4
5
6
7
8
CAN H
CAN L
CAN GND
-
-
-
CAN GND
-
Data input
Data output
OCZ
GND
48
13
/OA
OA
OB
/OB
/OZ
OZ
A phase
differential signal
B phase
differential signal
Z phase
differential signal
Z phase signal
(open-collector)
Encoder
pulse
output
RS485+
RS232_RX
RS232_TX
GND
RS485-
-
5
6
4
3
1
2
Please note:
*1 Please refer to C9 ~ C12 wiring
diagrams (SINK / SOURCE
mode) in section 3.4.4.
*2 4.5kW and below drives provide
built-in regenerative resistor.
*3 The coil of brake has no
polarity.
*4 For USB connection. It is used
to connect to personal
computer or notebook.
*5 A2-F only supports DMCNET
mode.