DigitAx User Guide
Issue code: dgxu4
10-8
The instantaneous values of current limit are given
as percentages of Pr41, and are shown in the
following read-only parameters:
Pr39 Value of the analog current limit signal
on terminal B1.
Pr40 Value of the analog current reference;
this can be made available at terminal
B16 as the Clamped Current Demand.
Pr41 Clamped Current Reference threshold,
corresponding to the lowest of the
values among Pr42, Pr43, and Pr39.
Pr80 Shows the value of the I
2
t
computation. I
2
t limitation will occur
when Pr80 reaches 100.
10.11 Methods of position control
Position control of the Drive uses the up–down
count capability of the internal 32-bit buffer. The
position reference is applied to this buffer. For
every count in the buffer, the Drive will step the
motor by
1
/
16384
th of a revolution (0.022°). As the
motor rotates, the buffer value is reduced by 1 for
each clockwise step, and incremented by 1 for each
anti-clockwise step. Since the Drive will always try
to reduce the value in the buffer to zero, this error
determines the direction in which the motor steps.
There are three methods of position control, as
follows:
• Pulse reference
• Digital reference
• Fixed increment reference
During position control, b41 Zero speed indication is
set at 1 when the buffer is empty and the motor is at
zero speed. This indicates that the motor is in
position.
Pulse Reference control
The position reference is applied as a pulse-train to
terminal C7 (maximum frequency is 240kHz) and a
direction signal to terminal C8. The pulses arriving
on terminal C7 are multiplied by a scaling factor set
in Pr70, and counted by the buffer. The signal
present on terminal C8 determines whether the
buffer counts up (positive value) or down (negative
value). As each pulse enters the buffer, the Drive
immediately steps the motor in the appropriate
direction, and attempts to keep the net value at
zero.
This mode of operation allows the Drive to be
directly controlled by a stepper controller. In this
case, the ramps should be controlled by the stepper
controller. The acceleration and deceleration ramps
on the Drive should be disabled (parameter b7 set
at 0).
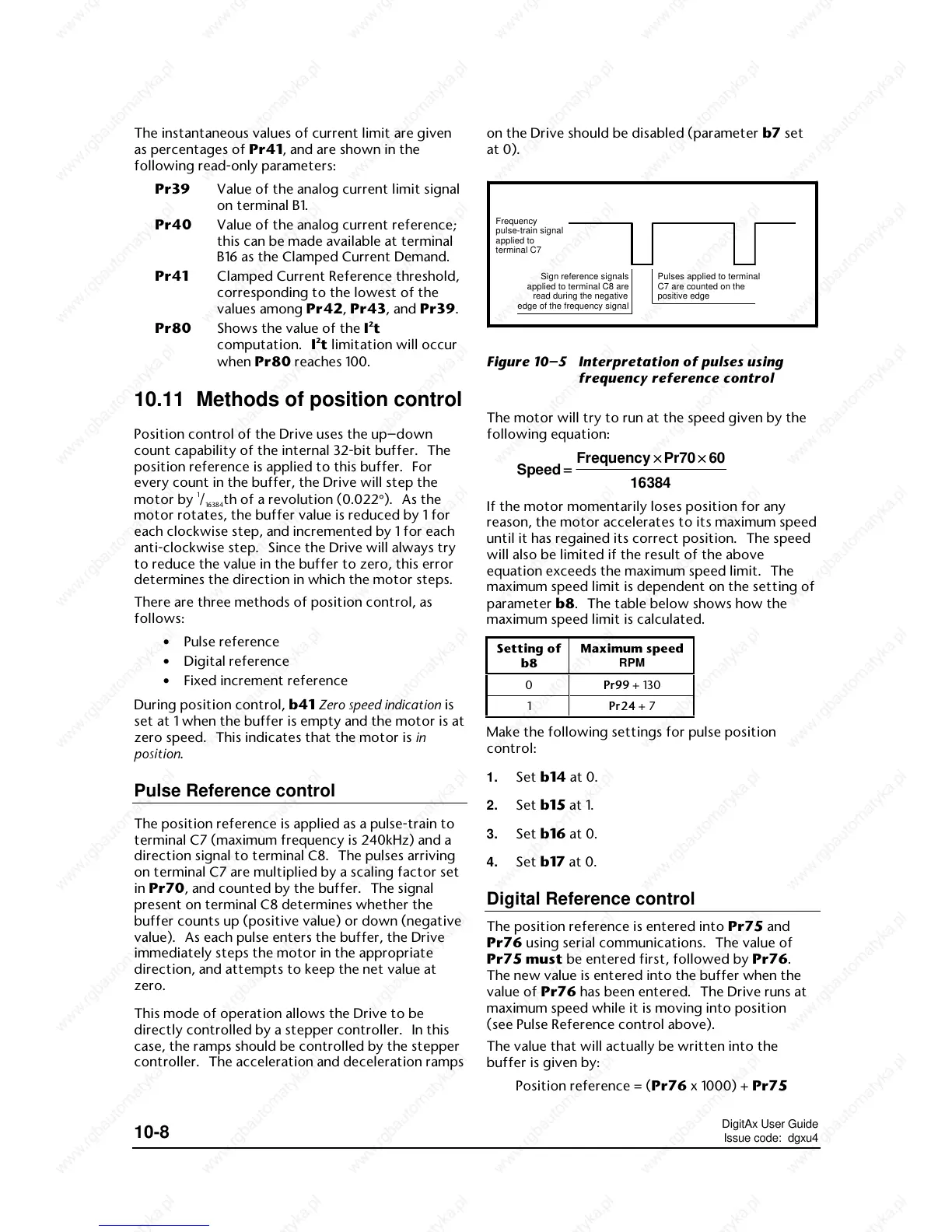
Frequency
pulse-train signal
applied to
terminal C7
Sign reference signals
applied to terminal C8 are
read during the negative
edge of the frequency signal
Pulses applied to terminal
C7 are counted on the
positive edge
Figure 10–5 Interpretation of pulses using
frequency reference control
The motor will try to run at the speed given by the
following equation:
Speed ==
××××Frequency Pr70 60
16384
If the motor momentarily loses position for any
reason, the motor accelerates to its maximum speed
until it has regained its correct position. The speed
will also be limited if the result of the above
equation exceeds the maximum speed limit. The
maximum speed limit is dependent on the setting of
parameter b8. The table below shows how the
maximum speed limit is calculated.
Setting of
b8
Maximum speed
RPM
0 Pr99Pr99 + 130
1 Pr24Pr24 + 7
Make the following settings for pulse position
control:
1. Set b14 at 0.
2. Set b15 at 1.
3. Set b16 at 0.
4. Set b17 at 0.
Digital Reference control
The position reference is entered into Pr75 and
Pr76 using serial communications. The value of
Pr75 must be entered first, followed by Pr76.
The new value is entered into the buffer when the
value of Pr76 has been entered. The Drive runs at
maximum speed while it is moving into position
(see Pulse Reference control above).
The value that will actually be written into the
buffer is given by:
Position reference = (Pr76 x 1000) + Pr75
 Loading...
Loading...