12. INSTALLATION
12-8
12.4.2 CAN bus input/output
How to select CAN bus input and output data
1. Long-press the ESC/MENU key to open the menu.
2. Rotate the RotoKey
TM
to select [INTERFACE] then push the key.
3. Use the RotoKey
TM
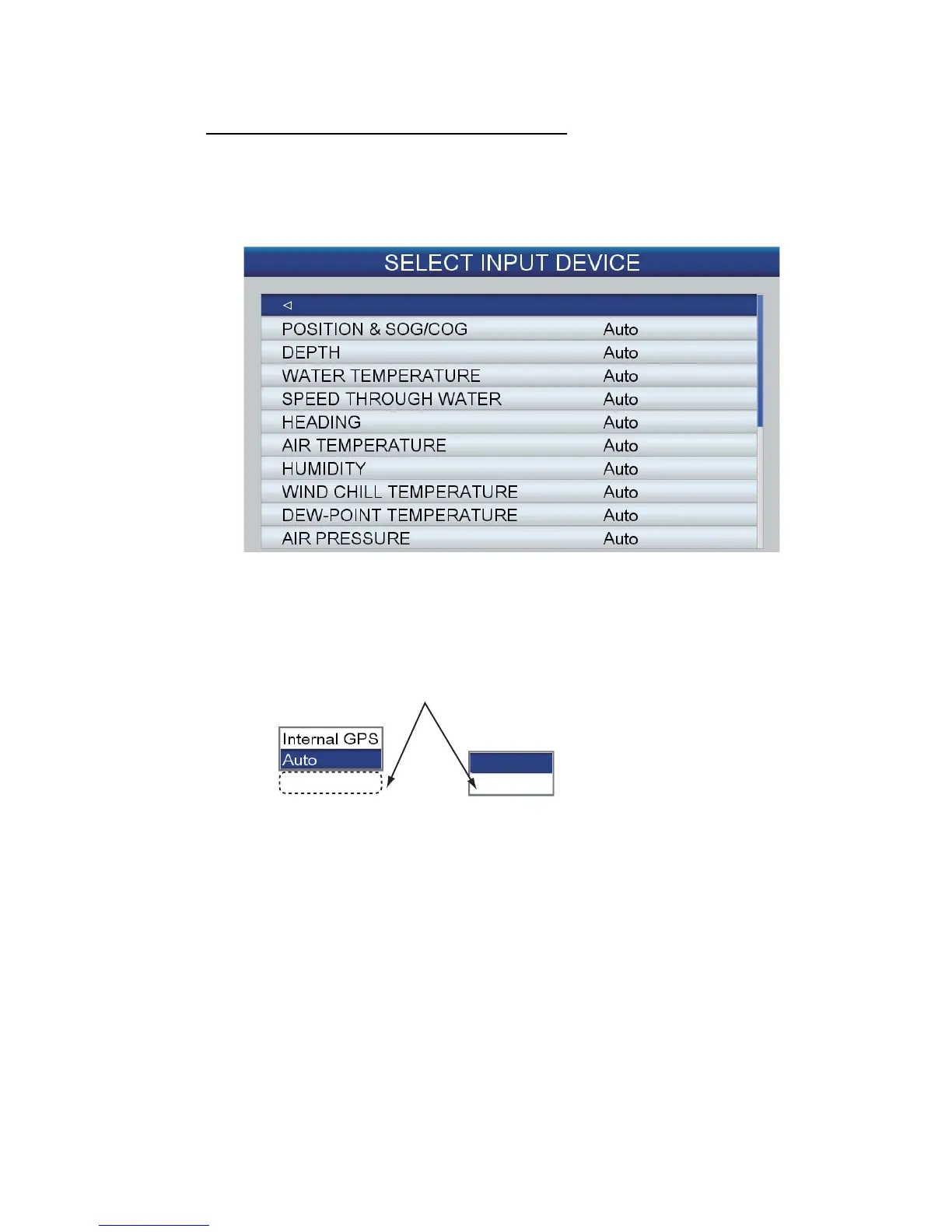
to select [SELECT INPUT DEVICE] then push the key.
4. Select the data to input as follows:
1) Use the RotoKey
TM
to select a data then push the key. For [POSITION &
SOG/COG], [DEPTH], [WATER TEMPERATURE] and [SPEED THROUGH
WATER], the following options windows appear.
2) For [POSITION & SOG/COG]:
[Internal GPS]: Position fix is obtained via the internal GPS antenna (including
optional GPS antenna).
[AUto]: Select if you have multiple external navigators connected and want to
use them instead of the internal GPS. In this case, the navigator with the low-
est IP address has priority.
If you have a FURUNO external navigator speed/course source connected, its
name appears below [Auto]. Select the model name to have that device feed
corresponding data.
3) For [DEPTH], [WATER TEMPERATURE] and [SPEED THROUGH WATER],
Select [Auto] when multiple sources are available. In this case, the device with
the lowest IP address has priority. In this case, the device with the lowest IP
address has priority.
POSITION &
SOG/COG
DEPTH, WATER TEMPERATURE,
SPEED THROUGH WATER
Name of connected
equipment appears here
Auto

 Loading...
Loading...






