5. Parameter Setting
5-5
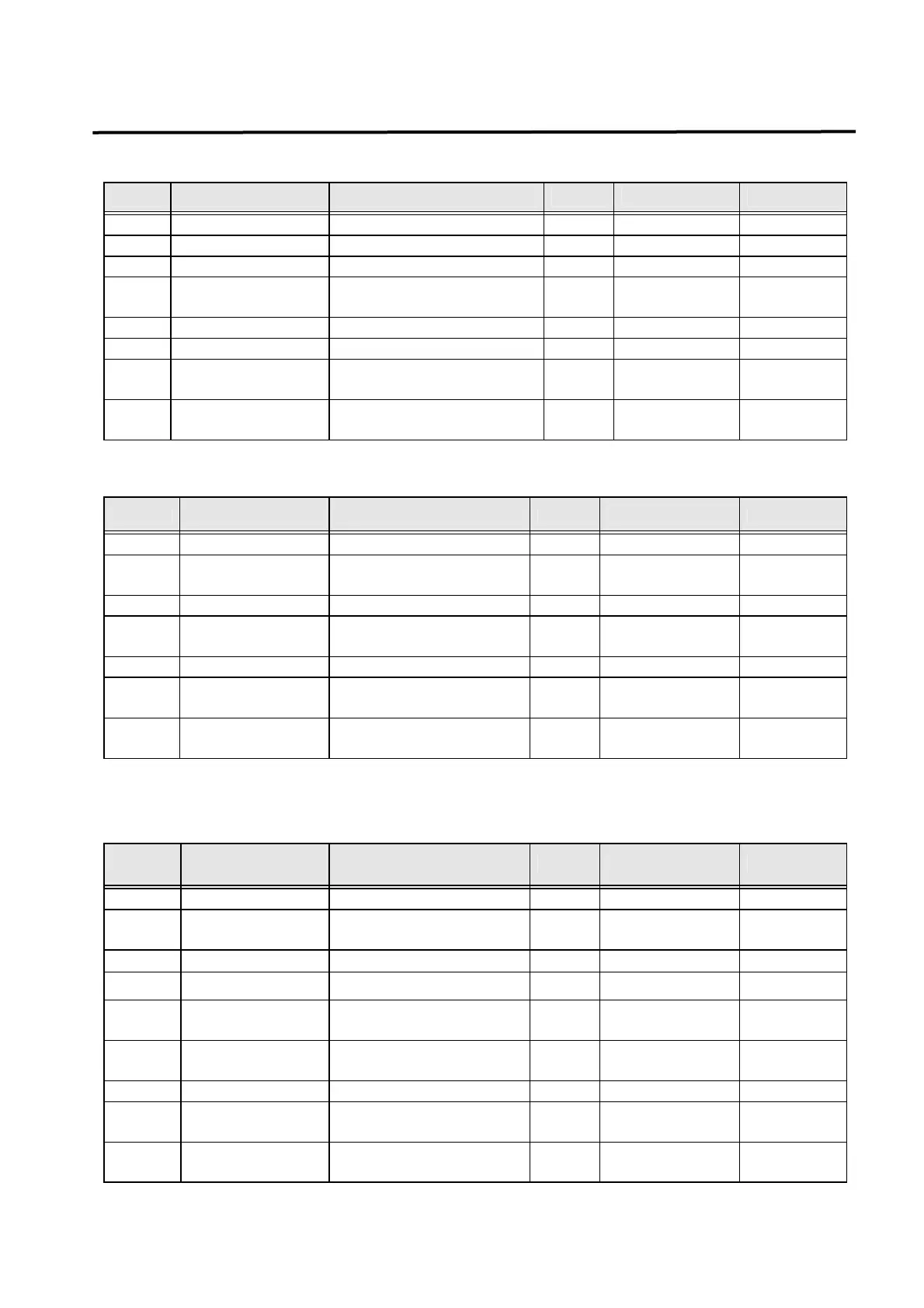
(7) Jog/Original mode parameter (Jog/Origin Mode: P6--)
Menu Menu title Description Unit Range Default
P6-01 Origin SPD0[rpm] Origin operation speed 0 rpm 0.0 ~ 9999.9 50
P6-02 Origin SPD1[rpm] Origin operation speed 1 rpm 0.0 ~ 9999.9 10
P6-03 Origin Torque[%] Damper Origin Torque % 0.0 ~ 300 50
P6-04 Origin Offset
Coordinates value of
Origin Position
USER
-9999.9 ~
9999.9
0
P6-05 Jog Speed0[rpm] Jog Operation speed 0 rpm 0.0 ~ 9999.9 100
P6-06 Jog Speed1[rpm] Jog Operation speed 1 rpm 0.0 ~ 9999.9 200
P6-07 INC Jog Value0
INC Jog Movement
quantity 0
USER 0.0 ~ 99999.9 50
P6-08 INC Jog Value1
INC Jog Movement
quantity 1
USER 0.0 ~ 99999.9 100
(8) Mechanical mode parameter (Mechanical Mode: P7--)
Menu Menu title Description Unit Range Default
*P7-01 Move Motor Motor rotation quantity USER 1 ~ 50000 1
*P7-02 Move Mechanical
Device movement
quantity
USER 1 ~ 50000 100
*P7-03 Move Polarity Movement Direction 0 ~ 1 1
*P7-04 Turret Cycle
Machinery Position per
a cycle
USER 0 ~ 50000 0
*P7-05 MPG Move[rev] Motor rotation quantity rev 1 ~ 10000 1
*P7-06 MPG Pulse[pulse]
Input MPG Pulse
Number
pulse 1 ~ 100000 100
*P7-07 Angle Division
Angle division stop
when Jog operation
USER 0 ~ 1000 0
(Caution !) Menus marked with "*" cannot be corrected during Servo-ON.
(9) Operation mode parameter (Operation Mode: P8--)
Menu Menu title Description Unit Range Default
*P8-01 Run Mode Operation Mode 0 ~ 7 1
P8-02 Stop Time [ms]
Continuous operation
stop time
ms 0 ~ 10000 10
*P8-03 Limit Select
Limit↔Jog↔Limit,Jog
0 ~ 2 0
*P8-04 Soft Lim Enable Select Soft Limit 0,1 0
P8-05 Soft CCWLim Set CCWlim Value USER
-99999.9~
99999.9
99999.0
P8-06 Soft CWLim Set CWLim Value USER
-99999.9~
99999.9
-99999.0
*P8-07 Dog Select Origin Return Operation 0,1 0
*P8-08 Auto Origin
Automatic Origin
Operation
0,1 0
*P8-09 Origin Rule Origin execution Method 0 ~ 24 2

 Loading...
Loading...