Operating mode
10
Function library
10.3
L
10.3-2
EDS82EV903-1.0-11/2002
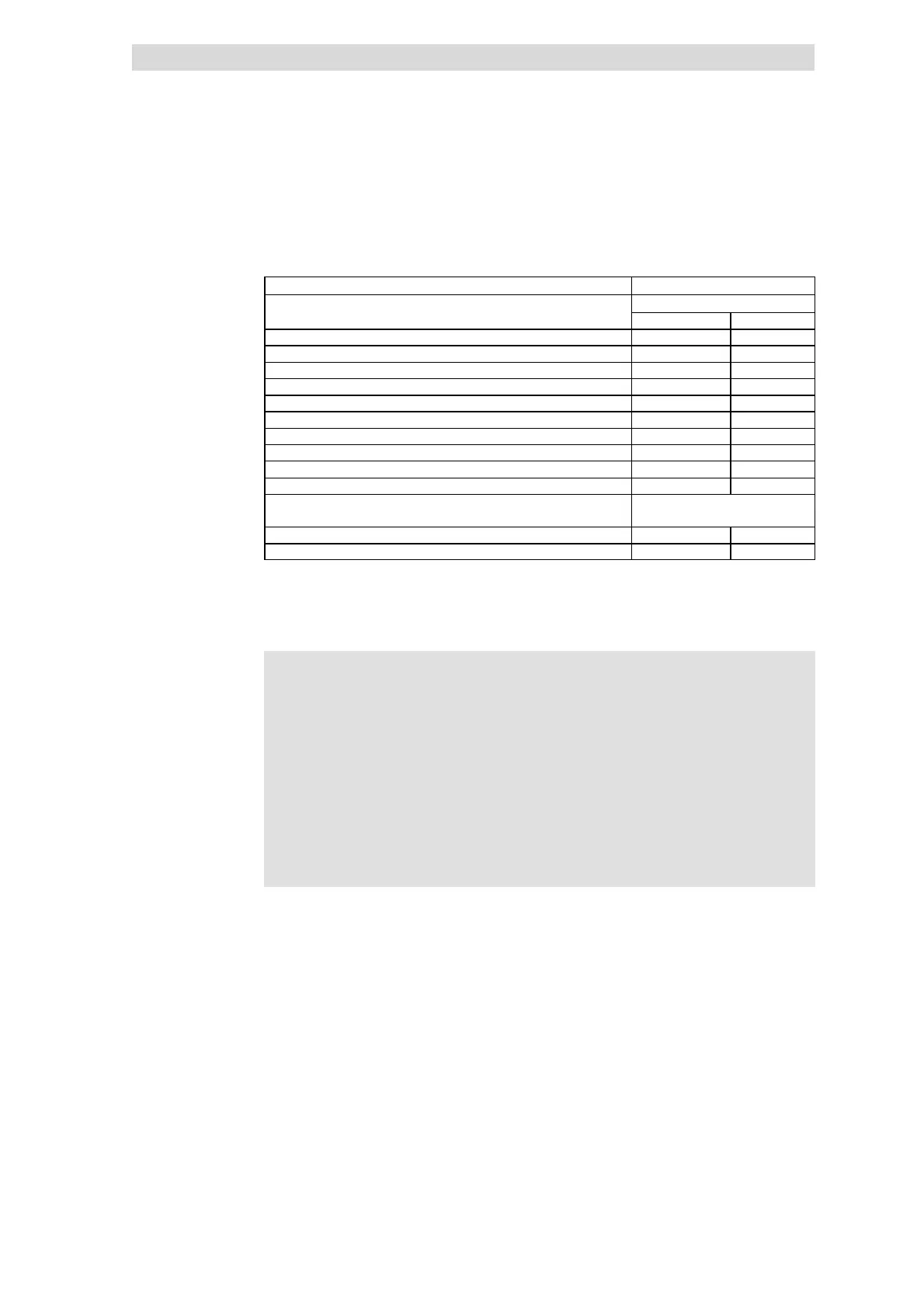
The following table helps you to find the correct operating mode for standard
applications:
Application Operating mode
Setting in C0014
Single drives recommended alternatively
with extremely alternating loads 4 2
with heavy start conditions 4 2
with speed control (speed feedback) 2 4
with high dynamic response (e. g. positioning and infeed drives) 2 -
with torque setpoint 5 -
with torque limitation (power control) 2 4
Three-phase AC reluctance motors 2 -
Three-phase sliding rotor motors 2 -
Three phase motors with assigned frequency-voltage characteristic 2 -
Pump and fan drives with square-law load characteristic 3 2or4
Group drives
(several motors connected to controller)
identical motors and identical loads 2 -
different motors and/or changing loads 2 -
C0014 = 2: linear V/f characteristic control
C0014 = 3: square -l aw V/F characteristic control
C0014 = 4: vector control
C0014 = 5: senso rless torque control
)
))
) Note!
l Only change between the operating modes if the controller is
inhibited!
l Do not use the operating mode ”Torque control” for
applications with power control!
l Optimum drive behaviour in process controller applications,
e.g. with speed control or dancer position control can be
achieved with the control modes ”linear V/f characteristic
control” or with ”vector control”.
– If you need a high torque at low speed we recommend the
operating mode “vector control”.
Operating modes recommended
for standard applications
 Loading...
Loading...