Commissioning
5-10 821XKlimaBA0399
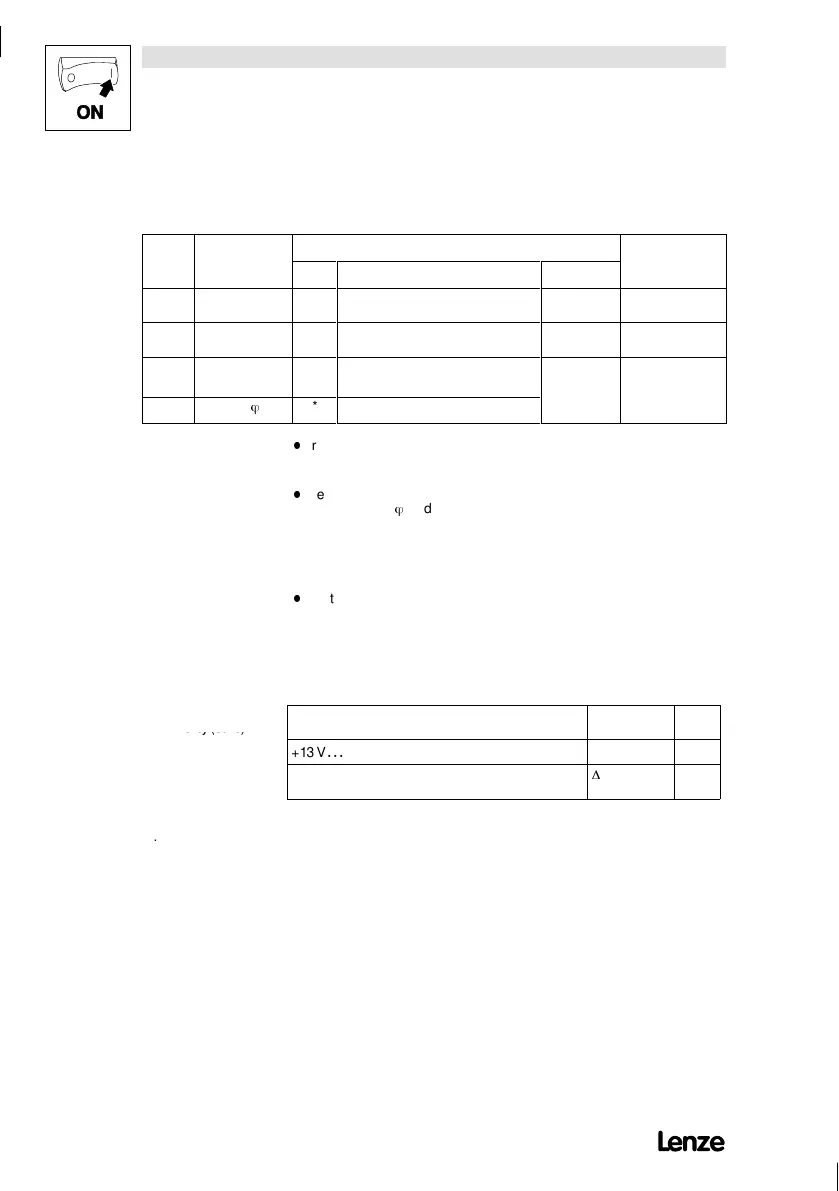
5.4.2.2 Optimisation of motor-current control
Codes required
Code Name
Possible settings
IMPORTANT
Lenze Selection Info
C015
V/f rated
frequency
50.00 7.50 {0.02Hz} 960.00
C021
Slip
compensation
0 -50.0 {0.1 %} 50.0
C088 Rated motor
current
* 0.0 ... 2.0 k rated output current
*depends on
the unit
Input only
necessary when
C091 Motor cos
j
* 0.4 {0.1} 1.0
adapted.
Setting sequence
-
Drives with matching 4 pole standard motors 230/400 V in star connection donot
need to be adapted. After having started the drive, the controller itself detects all
further motor data.
-
The following drives can be optimized by entering the nameplate data ”rated motor
current” and ”cos
j
” under C088 or C091:
- Motor one power class smaller than the motor assigned to the controller.
- Motor one or two power classes smaller than the motor assigned to the controller.
- Drives with 2, 6, 8, 10 and 12 pole standard motors.
- Drives with special motors.
-
With the slip compensation C021, youcan optimize the ”sensorless speed control”
for your application.
1.If necessary, select C014
=-4-.
(factory setting)
2.Select V/f-rated
frequency (C015).
Motor voltage
Motor
connection
C015
+13V¡ +30V
Y 50 Hz
220/380 V, 230/400 V, 265/460 V, 280/480 V, 380/660
V, 400/690 V
D
87 Hz
3.If necessary, enter the
motor data of unadapted
motors (C088, C091).
 Loading...
Loading...