2-24
Confirming the operation
2Unpacking to Installation
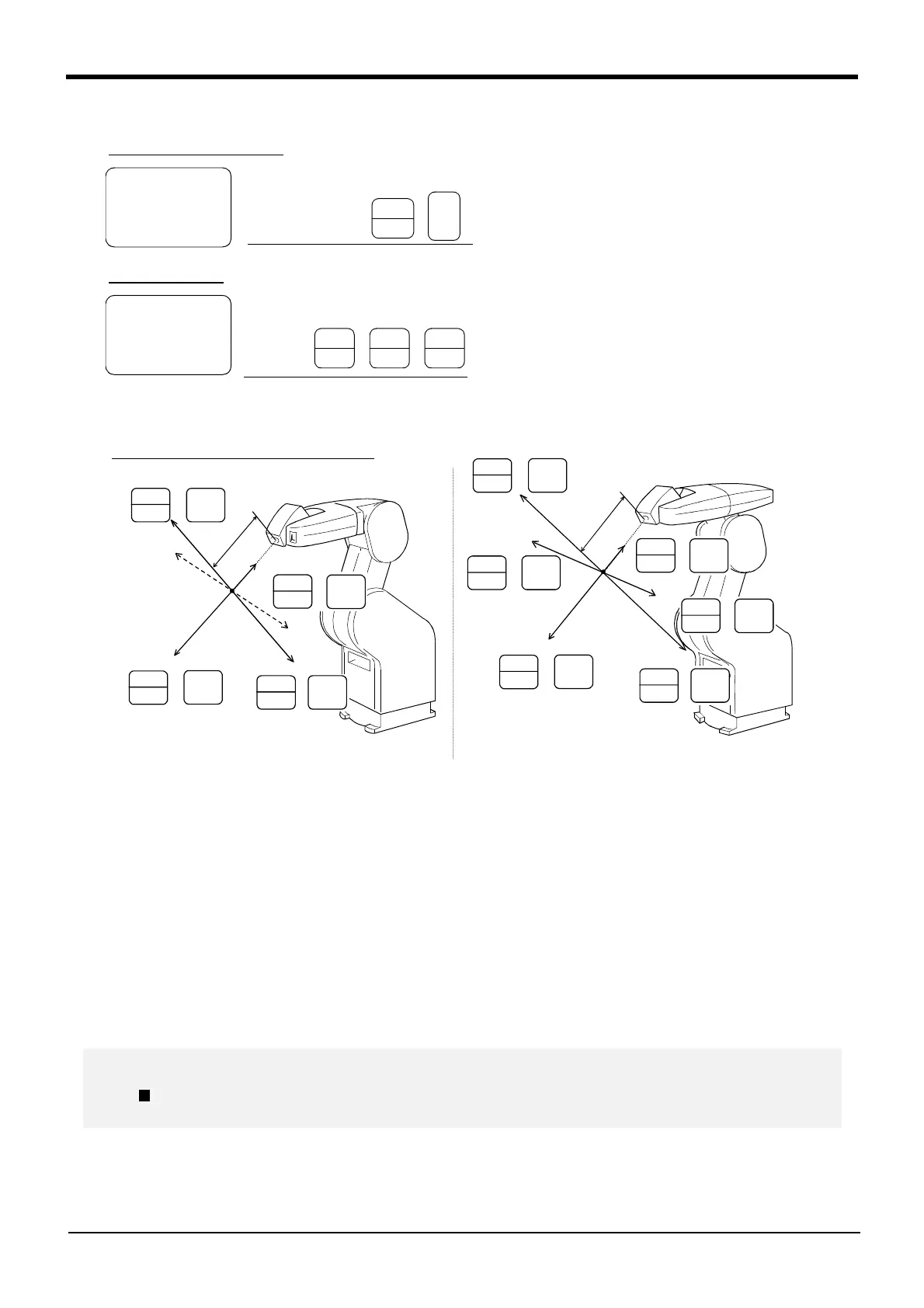
(3) TOOL jog operation
Press the [MOVE] + [TOOL] keys to select the
TOOL jog mode. "TOOL" will appear at the upper
left of the screen.
Each time the [MOVE] + [+] keys are pressed, the
override will increase in the order of LOW → HIGH
→ 3 → 5 → 10 → 30 → 50 → 70 → 100%. When
the [MOVE] + [-] keys are pressed, the override
will decrease in the reverse order. The currently
set speed will appear on the upper right of the
screen. Set the override to 10% here for
confirmation work.
・When the [MOVE] + [+X (J1)] keys are pressed, the robot will move along the X axis plus direction of the tool
coordinate system.
When the [MOVE] + [-X (J1)] keys are pressed, Move along the minus direction.
・When the [MOVE] + [+Y (J2)] keys are pressed, the robot will move along the Y axis plus direction of the tool
coordinate system.
When the [MOVE] + [-Y (J2)] keys are pressed, Move along the minus direction. (6-axis type only)
・When the [MOVE] + [+Z (J3)] keys are pressed, the robot will move along the Z axis plus direction of the tool
coordinate system.
When the [MOVE] + [-Z (J3)] keys are pressed, Move along the minus direction.
TOOL LOW
X +134.50
Y +220.00
Z +280.00
Select the TOOL jog mode
TOOL LOW
X +134.50
Y +220.00
Z +280.00
Set the jog speed
+
TOOL jog mode
STEP
MOVE
TOOL
=*/
Set the speed
+
STEP
MOVE
+
FORWD
-
BACKWD
Tool length
6 axis type
+Y
+Z
- X
(J1)
SPACE PQR
STEP
MOVE
+
4
MNO
- Y
(J2)
STEP
MOVE
+
8
, @\
+ Z
(J3)
STEP
MOVE
+
3
JKL
- Z
(J3)
STEP
MOVE
+
9
&< >
+Y
(J2)
STEP
MOVE
+
5-axis t
e
Tool length
- X
(J1)
SPACE PQR
STEP
MOVE
+
8
, @\
+ Z
(J3)
STEP
MOVE
+
+X
+Z
3
JKL
- Z
(J3)
STEP
MOVE
+
+Y
' ; ^
+ X
(J1)
STEP
MOVE
+
' ; ^
+ X
(J1)
STEP
MOVE
+
+X
Moving along the tool coordinate system
* The direction of the frange will not change.
◇◆◇ When the robot is in the transportation posture ◇◆◇
There are directions from which linear movement is not possible from the transportation posture. In this case,
an X will appear on the T/B screen, and the robot will not move. Refer to section "(1) JOINT jog operation" on
page 20, and move the robot to a position where linear movement is possible, and then carry out TOOL jog.
X

 Loading...
Loading...




