148
7.3.5) ROBUS w trybie „Slave”
Odpowiednio zaprogramowany i podłączony ROBUS może działać w
trybie “Slave” (sługa), ten tryb działania wykorzystywany jest w
przypadku potrzeby zautomatyzowania dwóch przeciwległych skrzydeł,
gdy zamiarem jest uzyskanie zsynchronizowanych ruchów obu
skrzydeł bramy. W tym trybie jeden ROBUS działa jako Master (pan), to
znaczy steruje manewrem, natomiast drugi ROBUS pracuje w trybie
Slave, to znaczy wykonuje polecenia wysyłane przez master (fabrycznie
wszystkie ROBUS zaprogramowane są jako Master).
W celu skonfigurowania ROBUS jako Slave należy uruchomić funkcję
pierwszego poziomu „Tryb Slave” (patrz tabela 7).
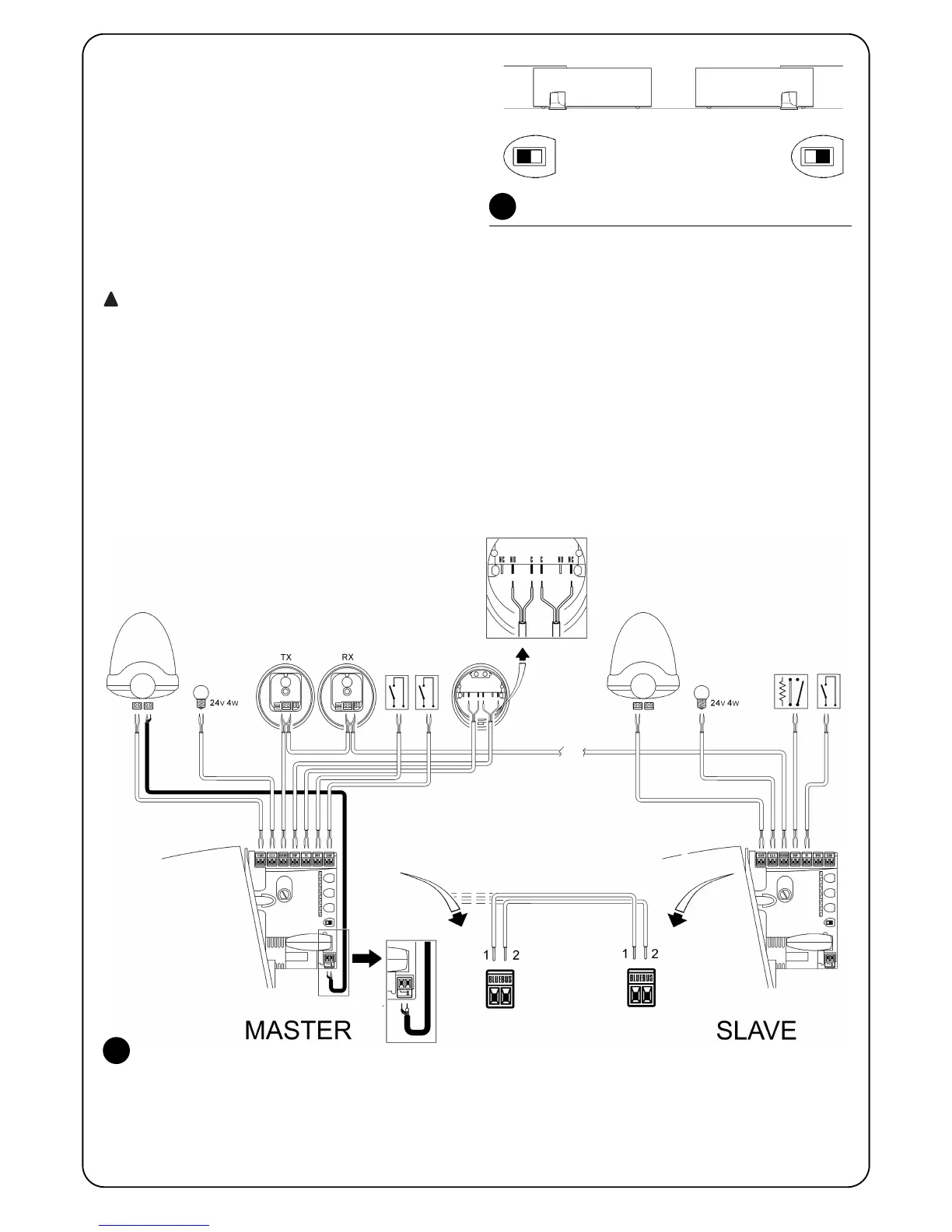
Połączenie pomiędzy ROBUS master a ROBUS Slave odbywa się za
pośrednictwem BlueBUS.
W tym przypadku należy zachować biegunowość połączeń
między obydwoma ROBUS, jak to zilustrowano na rysunku 26
(pozostałe urządzenia nie muszą mieć zachowanej
biegunowości).
W celu zainstalowania dwóch ROBUS w trybie Master i Slave należy
wykonać następujące czynności:
• Wykonać połączenie obydwu silników w sposób zilustrowany na
rysunku 25. Jest obojętne, który z silników funkcjonował będzie jako
master, a który jako Slave, wybierając należy uwzględnić wygodę
połączeń oraz fakt, że polecenie Krok po kroku w Slave zezwala na
całkowite otwarcie jedynie skrzydła napędzanego Slave.
• Połączyć dwa silniki jak na rysunku 26.
• Wybrać kierunek manewru otwarcia obydwu silników, jak to
wskazano na rysunku 25 (patrz także paragraf “4.1 Wybór kierunku”).
• Podłączyć zasilanie obu silników.
• W ROBUS Slave zaprogramować funkcję “tryb Slave” (patrz tabela
7).
• Wykonać rozpoznanie urządzeń podłączonych do ROBUS Slave
(patrz paragraf “4.3 Rozpoznawanie dołączonych urządzeń”).
• Wykonać rozpoznanie urządzeń podłączonych do ROBUS master
(patrz paragraf “4.3 Rozpoznawanie dołączonych urządzeń”)
• Dokonać pomiaru długości skrzydeł bramy przez ROBUS Master
(patrz paragraf “4.4 Rozpoznanie długości skrzydła”).”).
 Loading...
Loading...