149
PL
7.4.1) Funkcja “Otwiera zawsze”
Funkcja „Otwiera zawsze” jest ciekawą możliwością centrali sterującej,
która pozwala zawsze na wykonanie manewru otwarcia, kiedy
sterowanie „Krok po kroku” trwa dłużej niż 2 sekundy; jest to przydatne,
na przykład, aby podłączyć do zacisku P.P. Krok po kroku styki zegara
programującego tak, aby brama była stale otwarta o pewnej porze dnia.
Ta funkcja jest aktywna bez względu na sposób zaprogramowania
wejścia P.P, za wyjątkiem funkcji „Zamyka”, patrz parametr „Funkcja Krok
po kroku” w tabeli 9.
7.4.2) Funkcja “Owórz awaryjnie”
W przypadku, kiedy urządzenie bezpieczeństwa nie działa prawidłowo
lub nie działa w ogóle, istnieje możliwość sterowania i przesuwania
bramy w trybie „ręcznym”.
Szczegóły są podane w paragrafie „Sterowanie z zabezpieczeniami
niedziałającymi”, znajdującym się w załączniku „Instrukcje i ostrzeżenia
przeznaczone dla użytkownika siłownika ROBUS”.
7.4.3) Wezwanie do konserwacji
ROBUS pozwana na przypomnienie użytkownikowi, kiedy należy
dokonać kontroli konserwacyjnej automatyki. Ilość manewrów, po
której następuje wezwanie podzielona jest na 8 poziomów za pomocą
zmiennego parametru „Wezwanie do konserwacji” (patrz tabela 9).
Poziom 1 regulacji jest “automatyczny” i bierze pod uwagę ciężkość
manewrów, to znaczy siłę i czas trwania manewru, natomiast pozostałe
regulacje określane zostają na podstawie ilości manewrów.
Sygnalizacja potrzeby konserwacji następuje poprzez pulsowanie
lampy ostrzegawczej lub lampy podłączonej do wyjścia SCA, gdy jest
zaprogramowana jako „Kontrolka Konserwacji” (patrz tabela 9).
Na podstawie ilości wykonanych manewrów w stosunku do
zaprogramowanej granicy, pulsowanie lampy oraz kontrolki konserwacji
podają sygnały, o których w tabeli 16.
7.4) Funkcje specjalne
Tabela 14: Programy ROBUS Slave niezależne od ROBUS Master
Funkcje pierwszego poziomu (funkcje ON-OFF Funkcje drugiego poziomu (parametry programowalne)
Stand - By Prędkość silnika
Moment startowy Wyjście SCA
Tryb Slave Siła silnika
Wykaz błędów
Do Slave podłączyć można:
• własną lampę ostrzegawczą (Flash)
• własną kontrolkę otwartej bramy (SCA)
• własną listwę rezystancyjną(stop)
• własny pulpit sterowniczy (Krok po kroku) sterujący całkowitym otwarciem skrzydła Slave.
• W Slave wejścia Open i Close nie są używane.
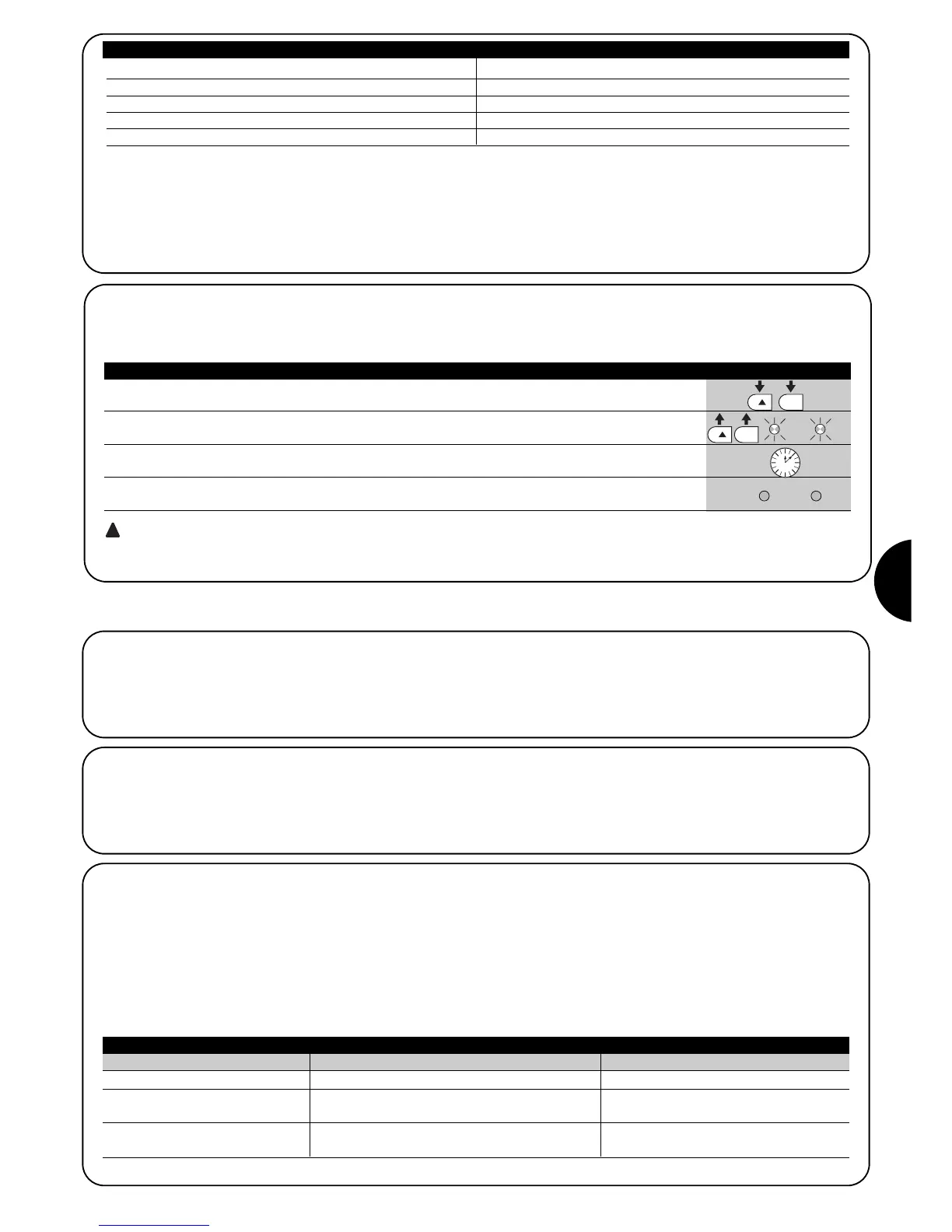
7.3.6) Rozpoznawanie innych urządzeń
Zwykle operacja rozpoznawania urządzeń dołączonych do BlueBUS i do wejścia STOP jest wykonywana podczas instalacji systemu; jednak po
każdym dodaniu lub odjęciu urządzenia możliwe jest powtórzenie rozpoznawania w sposób podany w tabeli 15.
1. Wcisnąć i trzymać wciśnięte przyciski [▲] i [Set]
2. Zwolnić przyciski, kiedy diody L1 i L2 zaczną bardzo szybko pulsować (po około 3 sekundach).
L1 L2
3. Odczekać kilka sekund aż centrala skończy rozpoznanie urządzeń.
4. Po zakończeniu rozpoznania diody L1 i L2 przestaną pulsować, dioda STOP musi pozostać zapalona,
natomiast diody L1...L8 zapalą się zgodnie ze stanem funkcji ON-OFF, które obrazują. L1 L2
Po dodaniu lub usunięciu urządzeń jest niezbędne wykonanie ponownie odbioru automatyki zgodnie z tym, co podano w
paragrafie „5.1 Próby odbiorcze”.
Ilość manewrów Sygnalizacja Flash Sygnalizacja kontrolki konserwacji
Poniżej 80% limitu
Pomiędzy 81 a 100% limitu
Ponad 100% limitu
Normalna (0,5 z włączone, 0,5 s wyłączone)
Na początku manewru pozostaje włączone przez 2 s, a
następnie przechodzi do trybu normalnego.
Na początku manewru pozostaje włączone przez 2 s,
a następnie przechodzi do trybu normalnego.
Włączona przez 2 s na początku otwierania
Pulsuje przez cały czas trwania manewru
Pulsuje stale.
Tabela 16: wezwanie do konserwacji przy pomocy Flash i kontrolki konserwacji.
 Loading...
Loading...