- 45 -
8. Perations
8.1 Return to origin position
Return to origin operation should be performed first in the following cases.
(1) When the power is turned on.
Battery-les absolute encoder compatible:
When the power is turned on for the first time, it is necessary to return to origin operation.
It is not necessary to return to origin operation when the power is turned on again after the
next time.
Incremental encoder compatible:
It is necessary to return to origin operation every time the power is turned on.
(2) When the actuator or motor is replaced.
It is necessary to return to origin operation both battery-less aboslute encoder compatible and
incremental encoder comapible.
(3) When alarm “Group E” is cleared by applying the power again.
It is necessary to return to origin operation both battery-less aboslute encoder compatible and
incremental encoder comapible.
For (1) and (2) with battery-less absolute compatible, “Absolute encoder ID Alarm error (01-153)” is
generated after the power is turned on, so perform the return to origin operation after resetting the
alarm.
If the electric actuator and controller are purchased as a set part number, "Absolute encoder ID Alarm
error (01-153)" does not occur when the power is turned on in (1) because the alarm is reset at the
factory.
However, when multiple units with the same set part number are purchased, If the electric actuator
and controller are connected in a different combination from the factory default, the "Absolute encoder
ID Alarm error (01-153)" will occur when the power is turned on in (1).
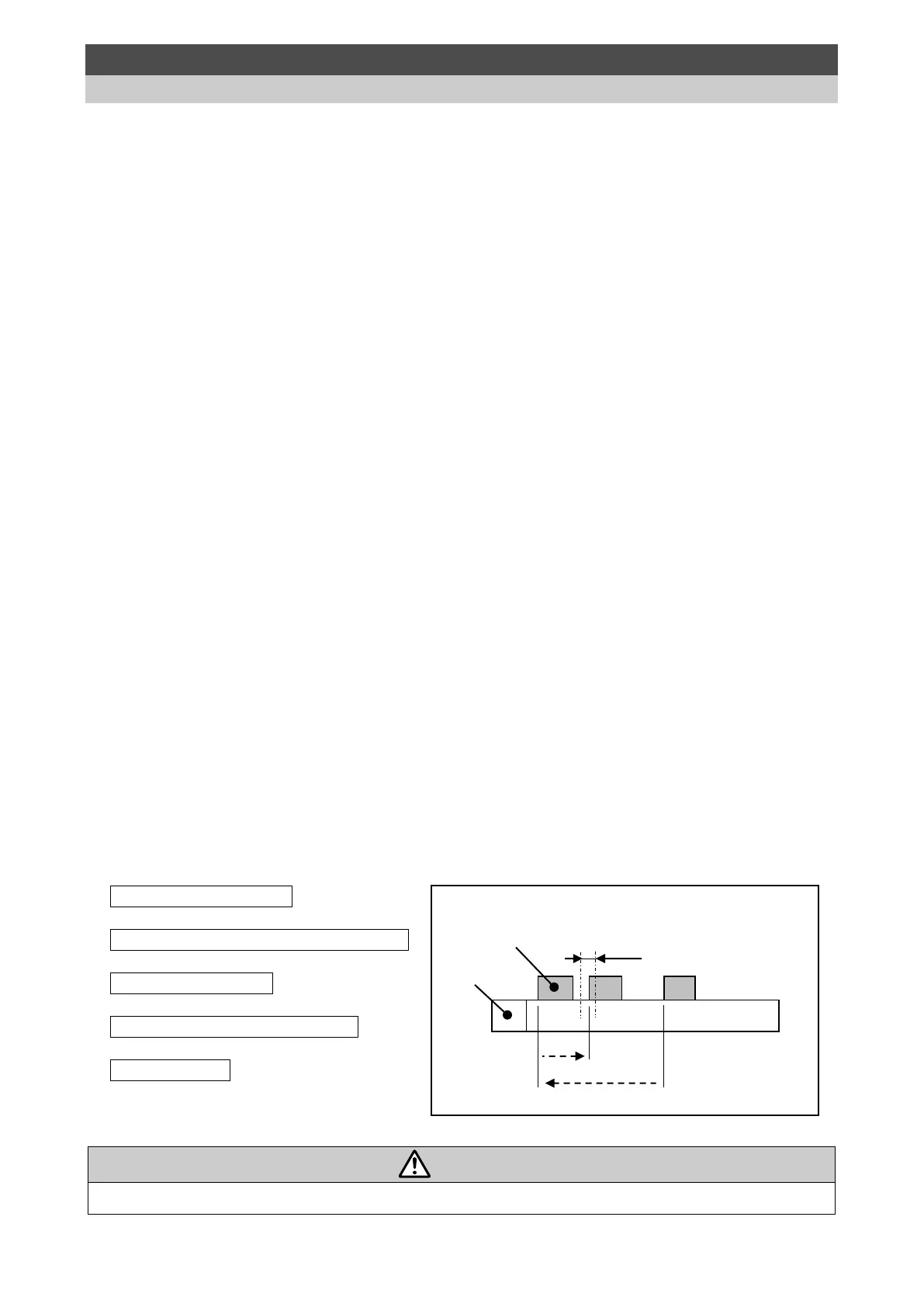
■Return to origin operation
The actuator moves in the return to origin direction (* this direction is dependent on the actuator) from the
initial position at the moment of power ON. Refer to (1) in the figure below.
When the actuator reaches the end of travel limit it pauses for a short time. The controller recognizes the
position as the end of travel limit of the actuator. Then, the actuator moves at a low speed in the direction
opposite to the return to origin direction: Refer to (2) in the figure below.
The position after the travel becomes the origin.
Return to origin signal
↓
Move in the return to origin direction
↓
Stop the movement
↓
Move in the opposite direction
↓
Origin position

 Loading...
Loading...









