- 42 -
7.2 Basic parameter
The "Basic parameter" is the data to define the operating conditions of the controller, conditions of the
electric actuator, etc.
Writing of the parameter should be performed while the electric actuator is stopped.
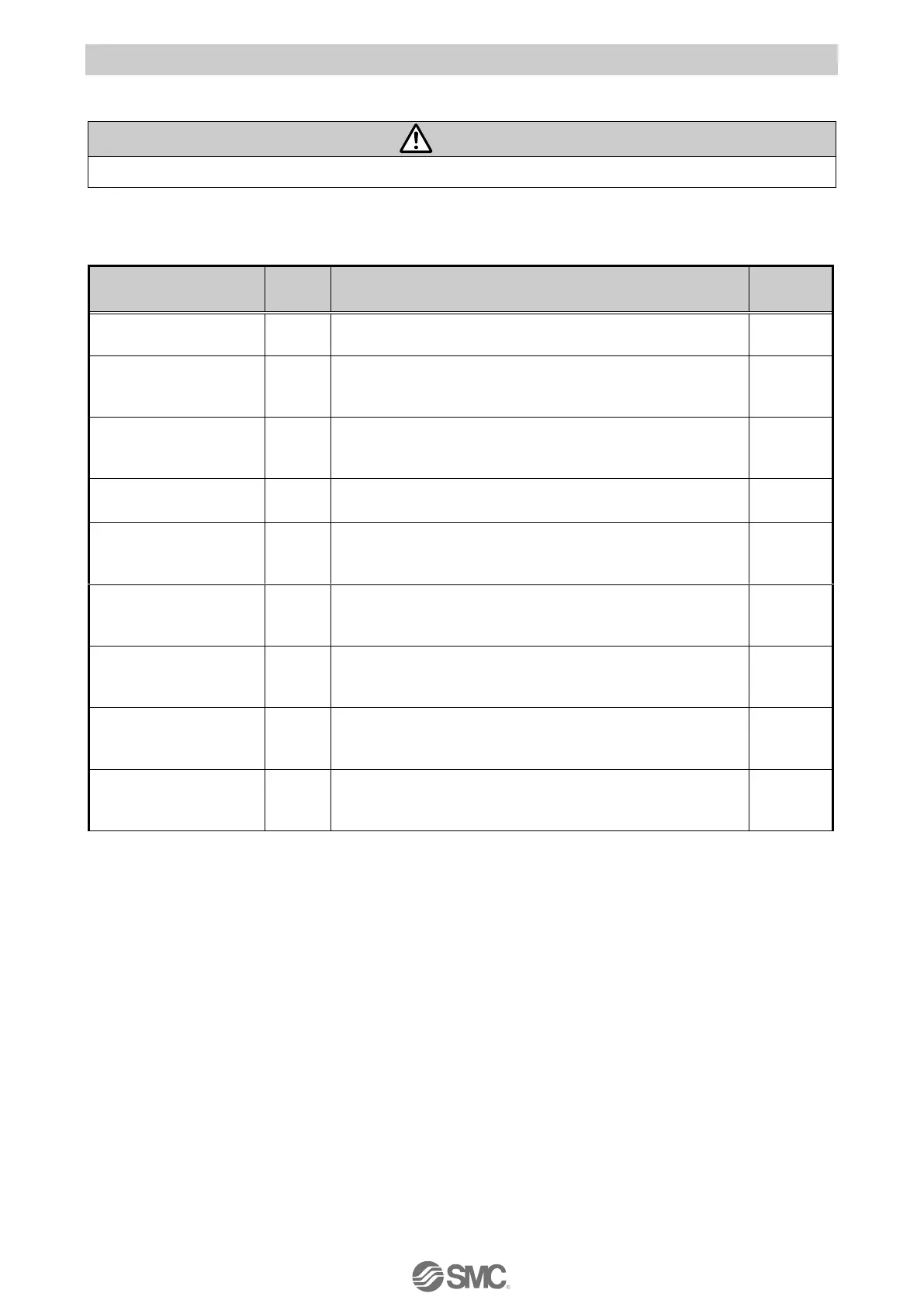
Details of basic parameter
Activation: "XX" = Become effective just after recorded into the controller
"X" = Become effective after restarting the controller
"-" = The parameter cannot be changed (fixed value)
Identification number (axis) parameters of serial communications
are set.
This is the fixed value for this controller (It should not be
changed).
The value for this should be 64(Standard).
This is the fixed value for this controller (It should not be
changed).
This defines the trapezoid acceleration/ deceleration parameter.
This is the fixed value for this controller (It should not be
changed).
This defines the positive (+) side limit of the position. (Unit: mm)
Any value greater than the [stroke (+)] value cannot be entered
in the "Position" field data of step parameter setup.
This defines the negative (-) side limit of the position. (Unit: mm)
Any value less than the [stroke (-)] value cannot be entered in
the "Position" field data of step parameter setup.
This defines the maximum limit of the speed (Unit: mm/s).
Any value greater than the [Max speed] value cannot be entered
in the "Speed" field data of step parameter setup.
*2)
This defines the maximum limit of the ACC/ DEC (Unit: mm/s
2
).
Any value greater than the [Max ACC/ DEC] value cannot be
entered in the "Accel" field data of step parameter setup.
This defines the range to activate the INP output when the
electric actuator is within it after the return to origin operation.
(Unit: mm)

 Loading...
Loading...









