6. Running by CiA402 drive profile
Using CiA402 drive profile, form CANopen network, the drive can be controlled. When using the drive profile
command, please set the command mode selection to CANopen (cmod=3[VF-S15], 5[VF-AS3]),
Frequency setting mode selection 1 to CANopen (fmod=6[VF-S15], 23[VF-AS3]) and Number of motor
poles for communication (f856) parameters. It needs to set only one time at first setting.
If use and set RS485 communication command parameter, the infinite state machine of
drive profile can not work expected behavior and may be damage the drive or cause
danger. So when use RS485 command parameter, do not access the drive object
profile.
6.1. CiA402 drive profile
Below figure describes the object relation. See “8.Example communication” for the running.
Control diagram:
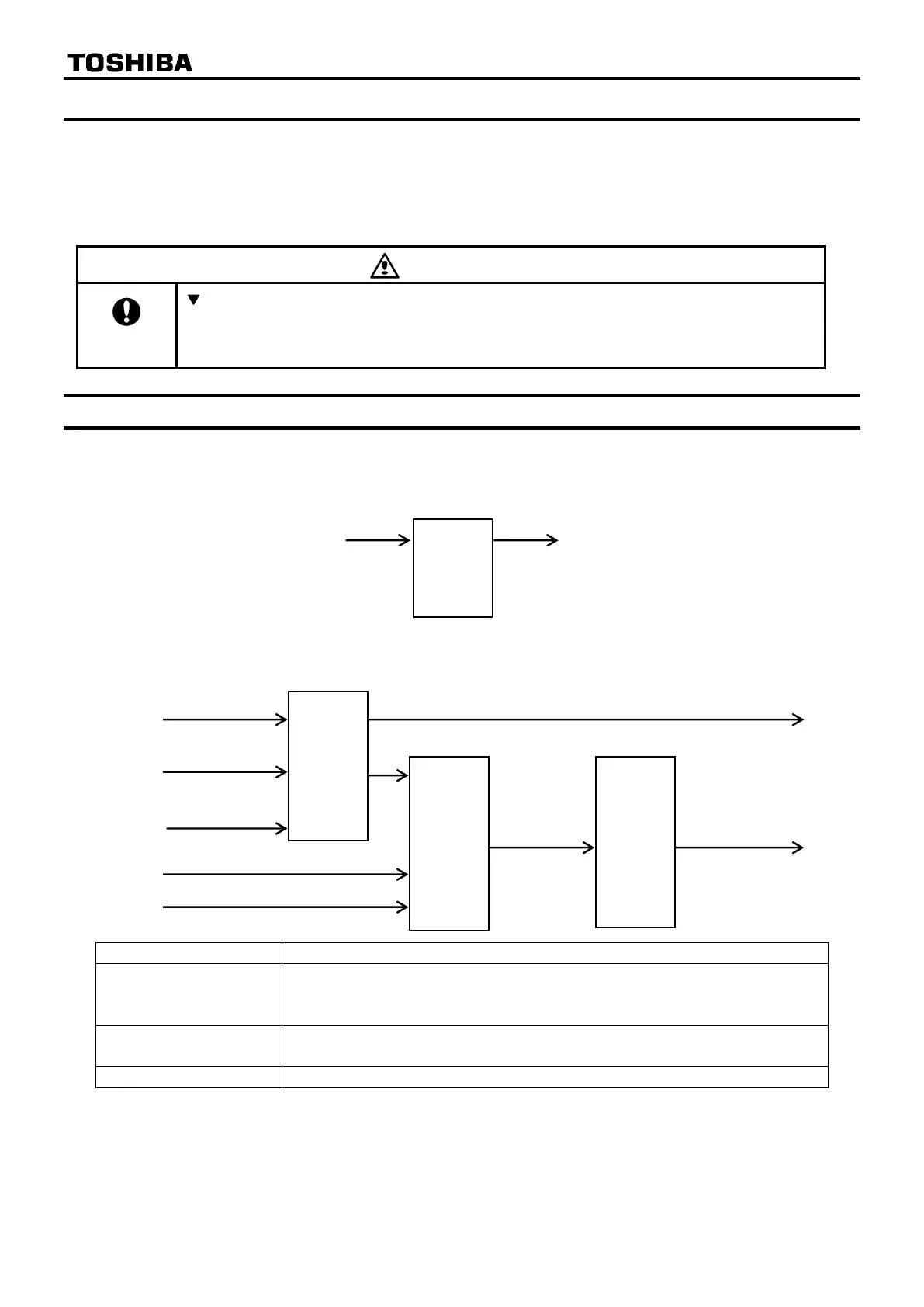
Simplified diagram of speed control in “Velocity” mode:
Limit the target velocity command (0x6042) regarding to min/max (0x6046).
And set to drive frequency command. If target velocity command is over or
less than 0x6046 value, set limit value to the drive.
Ramp function is provided by the drive.
CANopen protocol read the demand value and set to 0x6043.
Velocity control function
CANopen protocol read demand value and set to 0x6044.
*1: Do not change the acceleration/deceleration time unit (parameter f519), if change the parameter,
the setting value range will be different from above range. In this case, set 0(Linear) to acceleration/
deceleration 1 pattern (f502: 0x2502). (S-pattern isn’t supported.)
*2: Set Maximum frequency (fh) to the right max value. See “6.1.7.Object 0x6046: vl_velocity_min_max_
amount” for the detailed information.
Velocity
limit
function
*2
Velocity
control
function
vl_target_velocity
(0x6042)
vl_target_min/max
_amount (0x6046)
vl_target_acceleration (0x6048)
vl_target_deceleration (0x6049)
vl_demand_
value (0x6043)
vl_velocity_actual_
value (0x6044)
Statusword (0x6041) bit11 (internal limit active)
Number of motor pole for
communication
(f856: 0x2856)

 Loading...
Loading...











